Fred
I’d like you first to really decide whether you agree with my proposal of Bills’ definitions (B:CP) and diagram (LCS III) or not because in the course of your answers it’s obviously that you don’t agree.
Beside that you arranged our conversation in a way that suit your FCT (Fred Control Theory) and RCT (Ricks’ Control Theory)
As your description of »controlled quantity« diverge so much from Bills’ I think it’s good to see where you are contradicting Bill’s definitons.
[FWN] The controlled quantity is the variable we are perceiving and the value of which we wish to bring to some predefined and desired value, which we gauge by way of our perceptions of the value of that variable.
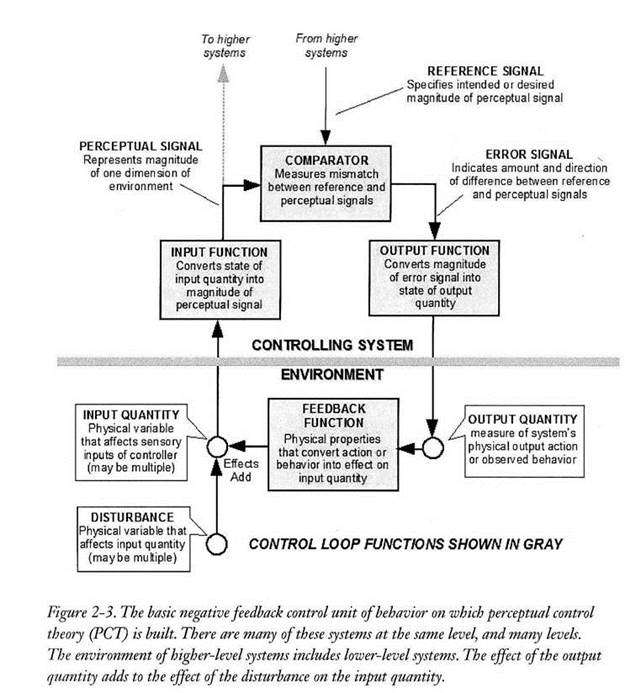
HB : You are not perceiving “controlled quantity” you are perceiving “input quantity” (see diagram LCS III) that is to be controlled in comparator. Then it will be “controlled quantity”.
Bill P (B:CP) : Consider once again the meaning of the term controlled quantity. A controlled quantity is controlled only because it is detected by a control system, compared with a reference, and affected by outputs based on the error thus detected. The controlled quantity is defined strictly by the behaving system’s perceptual computers
HB : The “controlled quantity” is perceptual signal that is defined by structure of control system. It does not exist outside of control system. “Controlled quantity” is causing “ouptut of the system”. Do you understand ?
Bill P :
ERROR : The discrepancy between a perceptual signal and a reference signal, which drives a control system’s output function. The discrepancy between a controlled quantity and it’s present reference level, which causes observable behavior
[FWN] Behavior, to me, is synonymous with outputs. This is far as I am going in this message.
HB : The biggest problem I see why you didn’t understand “controlled quantity” is because you didn’t understand what “Error” is in PCT. You stoppped conversation where it suits you. This is high class manipulation which can be compared only with Rick. But he is bigger manipulator.
HB : It’s important that you understand that we have “controlled quantity” which is causing behavior. It’s not that behavior is causing changes in “controlled quantity” and after that is perceived, but “controlled quantity” with references cause behavior. It even does not affect it. You mixed something Fred and you are contradicting to yourself in statements. But one thing is sure. If I conclude from your answers to me, you don’t agree with Bills’ definitions.
My proposal is that we use definitions that show in the same direction in PCT toward GENERAL THEORY OF LCS BEHAVIOR. Do we understand what I proposed ?
There is no “controlled quantity” through control loop except in comparator
-
There is no “controlled quantity” affected by output of the system -
There is no “controlled quantity” through the “feedback function” -
There is no “controlled quantity”entering “input function” -
There is no “controlled quantity” in “perceptual signal” -
There is “controlled quantity” in comparator and “error” signal”
HB : Are we done with “controlled quantity” ???
If you do agree with Bills’ definition than we don’t need to discuss it any more. It’s clear everything what is concerned about PCT and »controlled quanttiy«.
So if you agree with PCT definitions and diagram then I expect that in future you’ll use them in your conversations about PCT.
Then we can continue with experiments and life cases that will confirm or change definitions and diagram. But we need firm geberal theory that will be bases for experiments.
I answered for now just on your most problematic answer.
Regards,
Boris
···
From: Fred Nickols [mailto:fred@nickols.us]
Sent: Tuesday, December 26, 2017 4:50 PM
To: csgnet@lists.illinois.edu
Subject: RE: When Behavior is Controlled
[From Fred Nickols (2017.12.26.1040 ET)]
FN : Comments are embedded below.
HB : Let us understand Fred for the future. You answer on all of my statements or you better don’t answer at all. You are hiding all the way of your answers the main problem of our discussion. That “behavior is controlled” because its’ controlling some “controlled variable” in environment of the controlling system.
You have to understand that only organisms control 24/7 so that they keep all the “always) intrinsic variables in reference states (some acceptable physiological limits), This control is continuous. Whatever is happning outside is occasionally in accordance with control in organism.
So because of your misunderstanding of how orgsnisms function you made confussion again. And specially because you read mostly as you wanted to read not as it written. You also eanswered to what you wanted to answer and avoid what you didn’t want to answer.
So beside “controlled quantity” which was describe above most intricated problems were :
Second problem
O.K: another problem :
FN : But let me ask you this: How is it that a control system’s outputs affect its inputs?
HB : You said that you agree with Bills’ definitions. Why you are asking me this ? You could just read what Bill thought about “output function” and “feedback function” where it is clear “how output affects input”.
[FWN] My question was mainly rhetorical, Boris, but let me be more specific. Our perceptions are perceptions of something. If our outputs are to lead to changes in our perceptions, then it seems to me that that has to happen as a result or consequence of our outputs affecting whatever it is that we are perceiving.
HB : Yes but the problem is that behind this statement stands also statement that “output of the system controls controlled quantity”, because you build all your conversation on wrong Bills’ statement.
HB : I don’t say it’s your fault. But you could ask me privately what is “definition” of “controlled quantiy” about. Instead of that you rushed on CSGnet forum. Now we have to clear things up hear.
Some parts of your conversation are not problematic Fred. The most problematic are your statements about how “output of the system affects and controls controlled quantity”. And this atement is contradicting to almost all other statements.
Do we understand where is the problem ?
Another problem
Boris
From: Boris Hartman [mailto:boris.hartman@masicom.net]
Sent: Tuesday, December 26, 2017 3:35 AM
To: csgnet@lists.illinois.edu
Subject: RE: When Behavior is Controlled
Fred…
From: Fred Nickols [mailto:fred@nickols.us]
Sent: Friday, December 22, 2017 5:04 PM
To: csgnet@lists.illinois.edu
Subject: RE: When Behavior is Controlled
[From Fred Nickols (2017.12.22.1054 ET)]
FN : I agree with all of it, Boris.
HB : Nice Fred. I hope you mean it because if I see right you agreed only with one definition and you made your own “one case” theory as Rick is doing for a long time. So it’s by my opinion wrong if we look at it from the aspect of other definitions and diagram (LCS III). It’s real contradiction and mess.
OUTPUT FUNCTION : The portion of a system that converts the magnitude or state of a signal inside the system into a corresponding set of effects on the immediate environment of the system
Bill P (LCS III):…the output function shown in it’s own box represents the means this system has for causing changes in it’s environment.
[FWN] That was my point; that the output function is our means of effecting changes in our environment – which then lead to changes in our perceptions.
HB : No : Your point was that »ouput of the system affects and controlls controlled quantity«. So explain to me how »output of the system controls controlled quantity« ???
And the second problem in your discussion is
FEED-BACK FUNCTION : The box represents the set of physical laws, properties, arrangements, linkages, by which the action of this system feeds-back to affect its own input, the controlled variable. That’s what feed-back means : it’s an effect of a system’s output on it’s own input.
[FWN] Yes, but the effect of output on input is not direct; outputs cause changes in the environment; those changes lead to changes in our perceptions.
HB : You should read some physiology Fred. It’s true that mostly output affect environment., but it’s also true that in evolution muscle outputs and inputs are so tight together that you can talk about direct effect of output on input. for ex. turning your head. Wiht outpuit you are directly affecting input.
HB : You said Fred you agreed with Bills’ definitions. Bill explained in his whole literature why »control system’s outputs affect its inputs”. Just read it.
FN : On my part, and consistent with the definitions below, the system’s outputs affect the controlled
quantity.
HB : Where do you see this ? Show me. Is it general ? It is partly consistent with one definition and it’s no consistent with diagram (LCS III). Can you apply “the system’s outputs affect the controlled quantity” it to all behaviors ? I think that you are far from being consistent with other definitions of control loop which by my opinion show general theory…
Why didn’t you already citate the place in definitions where system output affects “controlled quantity” ???
We have no choice but to go definition after definition.
CONTROL : Achievement and maintenance of a preselected state in the controlling system, through actions on the environment that also cancel the effects of disturbances.
HB : Wher do you see »controlled quantity« ?
OUTPUT FUNCTION : The portion of a system that converts the magnitude or state of a signal inside the system into a corresponding set of effects on the immediate environment of the system
Bill P (LCS III):…the output function shown in it’s own box represents the means this system has for causing changes in it’s environment.
HB : Wher do you see »controlled quantity« ?
[FWN] See above. It’s that portion of the environment we wish to affect and the value of which we wish to effect.
FEED-BACK FUNCTION : The box represents the set of physical laws, properties, arrangements, linkages, by which the action of this system feeds-back to affect its own input, the controlled variable. That’s what feed-back means : it’s an effect of a system’s output on it’s own input.
HB : Where do you see »controlled quantity« ? Unless you agree that there is some »special controlled quanttiy« only in environment of the controlling system.
INPUT FUNCTION : The portion of a system that receives signals or stimuli from outside the system, and generates a perceptual signal that is some function of the received signals or stimuli
[FWN] Those signals or stimuli pertain to the controlled quantity; the variable we wish to control.
HB : Where do you see »controlled quantity« ?
Do I understand right that by your theory (I’ll cal it FCT) system should perceive changes in controlled quantitty and should turn them into »Controlled Perceptual Variable« ??? Is this what you are proposing ??? That’s not what Bill is proposing.
COMPARATOR : The portion of control system that computes the magnitude and direction of mismatch between perceptual and reference signal.
HB : Where do you see »controlled quantity« ?
[FWN] There is no controlled quantity inside the control system. There is a perception of it; a reference for it; and the result of comparing the two, which might or might not indicate an error.
Fred Nickols
WE should form some theoretical platform on which we could bild explabation of life examples (mather nature) and try to verify theory,
By my opinion there is only one definition that is seriously diverging from others. So my proposal account for definitions and diagram which by my opinion constitute general theory of human (LCS) behavior. Do you understand what I want to say.
I think that we have also to get clear what “controlled quantity” means in PCT ?
Bill P (B:CP) : Consider once again the meaning of the term controlled quantity. A controlled quantity is controlled only because it is detected by a control system, compared with a reference, and affected by outputs based on the error thus detected. The controlled quantity is defined strictly by the behaving system’s perceptual computers
HB : “Controlled quantity” is imagined construct of controlling system. It’s not existing in environment of control system, so it can’t be affected or even controlled by systems output. Definition of “error” is clearly showing that “controlled quantity” is matter of comparator. It’s inside control system and it’s causing behavior.
From diagram (LCS III) you can see that it’s “input quantity” that is affected by output of the system not “controlled quantity”. “Input quantity is entering “input function” not controlled quantity. It’s input quantity that is affected by output. That is only “controlled variable” that is to be controlled in comparator.
According to definitions (B:CP) and diagram (LCS III) system output is adding effects to input. It’s not affecting “controlled quantity” although imaginary we could say so.
The problem I see is that you will start with wrong conclusions like Rick is doing. You’ll try to prove that “Behavior is control” and that there is some “Controlled Perceptual Variable” which unexisting term n PCT.
Please study all definitions once again It seems that you already started to concluding that PCT has “Behavior is control” and there is some “controlled aspect of environment. So I suppose it will not take long that you’ll comre to the conclusion that there is some “controlled perception”. It’s wrong at least in PCT .
If you’ll insist on these conclussions I advise you to make your own theory with Rick and Martin.
RCT (Ricks Control Theory) definition of control loop
-
CONTROL : Keeping of some »aspect of outer environment« in reference state, protected (defended) from disturbances. -
OUTPUT FUNCTION : controlled effects (control of behavior) to outer environment so to keep some »controlled variable« in reference state
-
FEED-BACK FUNCTION : »Control« of some »aspect of outer environment« in reference state. -
INPUT FUNCTION : produce »Controlled Perceptual Variable« or »Controlled Perception«, the perceptual correlate of »controlled q.i.« -
COMPARATOR : ???? -
ERROR SIGNAL : ???
FN : In other words, the system’s outputs change, modify or alter the controlled quantity to keep the system’s perception of that controlled quantity aligned with the system’s reference signal for that quantity.
HB : As I said above. in other words this is your control theory as it doesn’t represent PCT or at least most of it definitions and diagram. But it probably represent FCT (Fred’s Control Theory). You based your theory on one definition and one case. And it seems that you want to conclude that this could be GENERAL THEORY OF HUMAN (LCS) BEHAVIOR that organisms control inside and outside. This is your theory Fred although you were misleaded by Bills’ mistake.
If you think that your theory is general than you’ll have no problems explaining with your theory how organisms “control” outer environment in sleeping, observing, walking, sunshining, sitting and thinking. Please explain it from tha point of your new theory.
We need general theory that can explain any behavior not just one behavior and half of control loop. Do we understand Fred.
FN : Again, in other words, we act on our environment so as to make our perception of some aspect of it agree with the way we want it to be. And again, I ask you, how is that not controlling?
HB : This is yours “other words”. I don’t know what is going on in your imagination but I don’t see any of your statements in Bills’ definitions.
We do not act on our environment so to make our perception agreed with the way we want, but we produce just blind effects to immediate environment. See definition of “output function” and “feedback function”. If you’ll read B:CP you’ll see Bills’ explanation why we can’t control our behavior. There are also physiological evidences.
Among many effects to the immediate environment there are also effects to input through “feedback function” to . “Input function” which senses those effects.
Where do you see that you act on “controlled quantity” to make some perception of some controlled aspect of environment the way you want it to be. Show me where can we find this in PCT ? It’s your interpretation and your model of reality. That is not PCT ?
Bill P : Our only view of the real world is our view of the neural signals the represent it inside our own brains. When we act to make a perception change to our more desireble state – when we make perception of the glass change from “on the table” to " near the mouth" – we have no direct knowledge of what we are doing to the reality that is the origin of our neural signal; we know only the final result, how the result looks, feels, smells, sounds, tastes, and so forth.
HB : From this Bills citation we can blindness of output. There is no trace that you could control something in environment or even to control »controlled quantity« if you don’t know what you are doing to reality. It’s blind effect on environment until it is perceved. It’s no »Control of behavior« or »controlled effects« on input. It’s just blind effects of output on input. Output makes effects and input perceive that effect. If. It’s that simple.
I hope you’ll understand that first we have to solve what is written in definitions and what diagram (LCS III) is showing and what is “controlled quantity” in PCT. It’s all part of Bills’ general theory.
My proposal of definitions and diagram is by my opinion showing GENERAL THEORY OF HUMAN (LCS) BEHAVIOR. What is the cost for your friend to try to analyze every behavior from the view I proposed. Afterall if definitions and diagram turned out to be wrong through many life examples that will be analyzed we can still change it. Why don’t give Bill a chance ? Alison, Barb, Rick, Martin, Bruce, … ???
Best regards,
Boris
HB : Which example of “controlling outer environment” to the extend you want it to be in your way you have in mind Fred ? Whatever you are telling us is not general principle. But it may work in some behavior examples. Show me how it works with sleeping, observing and so on. PCT is general theory about how organisms function. So show me how your principle is general.
Otherwise is a good observation Fred. The problems you have to solve here is how you are controlling in the whole control loop. First problem you have to solve is whether “Behavior is controlled or not”,
Bill P (B:CP)
OUTPUT FUNCTION : The portion of a system that converts the magnitude or state of a signal inside the system into a corresponding set of effects on the immediate environment of the system
Bill P (LCS III):…the output function shown in it’s own box represents the means this system has for causing changes in it’s environment
HB : The second problem you have is to show that all behaviors have “controlled aspect of outer environment” . Controlled quantity is not “controlled aspect” of outer environment. It’s “input quantity” that will be controlled in comparator.
And the things outside are not always as we want them to be, We rarely control outer environment to the extend that is controlled inside. But anyway where do you see from definitions and diagram that “controlled quantity” is controlled outside. And you said that you agree with definitions and diagram.
And where do you see this ?
HB : And the biggest problem that you’ll have to love is whether there is really some” Controlled Perceptual variable”or CPV as the result of controlling in environment as Rick is claiming. So the main question is whether you control outside to the extent that you control inside. If you’ll use “canonical” principle you will go into a trap.
Dear Fred. I was facing all your thought problems when I was talking to Bill. At least I thought as you thought at least 15 years ago. So please reconsider once again all Bills definitions and diagram.
Do you understand what I’m asking you ? Bills’ definitions shows how external environment is stabilized, not controlled. Show me in any definition where ddi he mentioned control. Remember you said that you agree with them. So respect them in your analyses.
If you were controlling something in environment than control has to enter somehow into organism through perception. And it seems that all on CSGnet agree that control “environment doesn’t control organisms”. At least Rick has the biggest problem with this, He is claiming that control is entering organism through “Controlled perceptual Variable”.
Bills’ definitions and diagram shows how control is achieved in internal environment generally.
That was the main problem bill was directing me. You can’t analyze behaviors onece by one principles and another time with others. RCT (Ricks control Theory) is wrongly presenting control loop and how control function.
FN : For me to control something is to make it be the way I want it to be.
I want a cup full of fresh coffee. I make a pot and fill my cup.
HB : Your perception of filling cup of coffee was controlled inside organism. Perception of cup of coffee outside was not controlled to the extend that it was controlled inside organism. But it helped control inside organism. It is state in inner environment that it want it to be. It’s references that are set inside organism not outside. The perception of cup of coffee is in the state you want it to be inside. You are controlling inner state of organism not outer. The state of cup of coffee means nothing if you are
PCT offers a marvelous explanation of how that is accomplished. I understand full well that all I know of the state of my coffee cup I know by way of my perceptions. I also know full well that I know my cup is full because I perceive it to be so. But if you insist on telling me that I do not control the level of the coffee in my cup then my response to you is to say that you and I have very different understandings of “control”
HB : Right Fred.
You didn’t feeled your cup of coffee to the reference state, because you don’t know whether you’ll drink it all or not whether it will match your references or not. Maybe you drink it all but you’ll some bad feeling. So it was not controlled in organism well. Maybe taste, maybe to much sugar. You were filling cup of coffee to some extend that could suit you but you don’t know before you really match it to references. You don’t whether full cup of coffee is refer3ence state in organism so that when perception will be matched to references the fulled cup of coffee was really fulled to reference state, You will know when you’ll start drinking it.
Maybe you’ll do just You can just drink a Control of perception will tell you how much of coffee is enough not the state of cup of coffee in external environment. But you filled
You just filled your cup of coffee to some extend you think it could match your references. But whether that was wanted state you’ll know only when it is matched to real reference inside organism.
So you don’t know whether cup of coffee was “controlled” to the extend that it is controlled in organism before you try it. You don’t know whether cup of coffee is in reference state or not. You don’t whether food is prepared to reference state before you try it.
Whatever you were doing in environment you were just acting on it so that you changed perception to the state that matches the reference and you know whether is in reference state or not. Not before. You can guess You never know whether outside state is in reference state until you match it to reference. You can predict
If you filled it to some state that you think it could be enough for your control in the organism. So you didn’t control it to the extend of your control in organism but it’s just a trial. Maybe you’ll drink it or not. Not mentioning whether the taste will do or not. When you’ll control it in organism you’ll know it. But whatever you did in the environment is not controlled to the state you wanted it, it’s a trial to control perception to the state you want it.
You’ll know after you try it and then you’ll know in accordance to error. Maybe you’ll make another attempt by adding sugar or a little more coffee. And you’ll try it again until you’ll come to the perception that matches your references if it will. But it will be perception that will be controlled not a cup of coffee although it can be represented in perception.
But you can say that environmental variable is stabilized to some state that cause the perceptual signal to match the reference state in organism. But there is no reference state in environment. You can imagine it of course. which causing perception to match to It is controlled to the organisms reference state but i
Perception is controlled when reference state is achieved in controlling system. So that intrinsic variables are in their physiological limits. So you are not controlling in environment, you are controlling inside, but you stabilize environment to the extend that perceptions in external environment are controlled to the reference state in organism.
Finally you can say that you manage to stabilize (find) some state that is matching reference state in organisms, But you didn’t find reference state in environment (because there is no reference state in environment) and you didn’t but it was not achieved with control of behavior and it didn’t cause any “Controlled Perceptual variable”. Control was not done in environment but in organism. If you could control reference states in environment with control of behavior there wouldn’t be any corrections.
FN : ….and I don’t wish to get caught up in endlessly chasing my tail.
HB : I don’t know about tail, burt you are sure endlessly chasing control in organism.
Fred Nickols
From: Boris Hartman [mailto:boris.hartman@masicom.net]
Sent: Friday, December 22, 2017 10:37 AM
To: csgnet@lists.illinois.edu
Subject: RE: When Behavior is Controlled
Ups sorry Fred I forgot to aks you. Do you agree with definitions (B:CP) and with diagrma LCS III
Definitions of PCT control loop :
Bill P (B:CP):
-
CONTROL : Achievement and maintenance of a preselected state in the controlling system, through actions on the environment that also cancel the effects of disturbances.
Bill P (B:CP):
-
OUTPUT FUNCTION : The portion of a system that converts the magnitude or state of a signal inside the system into a corresponding set of effects on the immediate environment of the system
Bill P (LCS III):…the output function shown in it’s own box represents the means this system has for causing changes in it’s environment.
Bill P (LCS III):
-
FEED-BACK FUNCTION : The box represents the set of physical laws, properties, arrangements, linkages, by which the action of this system feeds-back to affect its own input, the controlled variable. That's what feed-back means : it's an effect of a system's output on it's own input.
Bill P (B:CP) :
-
INPUT FUNCTION : The portion of a system that receives signals or stimuli from outside the system, and generates a perceptual signal that is some function of the received signals or stimuli.
Bill P (B:CP) :
-
COMPARATOR : The portion of control system that computes the magnitude and direction of mismatch between perceptual and reference signal.
Bill P (B:CP)
-
: ERROR : The discrepancy between a perceptual signal and a reference signal, which drives a control system’s output function. The discrepancy between a controlled quantity and it’s present reference level, which causes observable behavior.
Bill P (B:CP) :
-
ERROR SIGNAL : A signal indicating the magnitude and direction of error.
All the best,
Boris
From: Fred Nickols [mailto:fred@nickols.us]
Sent: Friday, December 22, 2017 4:02 PM
To: csgnet@lists.illinois.edu
Subject: When Behavior is Controlled
[From Fred Nickols (2017.12.22.0956 ET)]
The glossary in B:CP (2nd Edition) makes it clear that control is concerned with the achievement and maintenance of a pre-selected perceptual state in the controlling system.
The glossary also makes clear that the controlled quantity is an environmental variable that corresponds to the perceptual signal in a control system. It also makes clear that the controlled quantity is affected and controlled by the outputs from a control system’s output function.
Thus we control both the environmental variable and our control of it.
So, when the environmental variable we wish to control is our own behavior (e.g., speaking respectfully to others), do we not then control our behavior and our perception of our behavior?
Fred Nickols