Continuing the discussion from Collective control as a real-world phenomenon:
I have a several problems with Rick’s treatment of “social control” in his recent book, but one of the most relevant to the current discussion comes in his treatment of “Conflictive Control.” Here are some quotations that I find problematic, all taken from section 7.1.6 of Marken’s book:
Conflictive control is just the opposite of cooperative control. While cooperative control involves individuals working together to achieve a result that each individual could not produce on their own, conflictive control involves individuals or groups working against each other to achieve a different result for each individual or group. From the control theory perspective, conflict occurs when two or more control systems are trying to bring the same perceptual variable to different reference states. (p. 113)
All good, so far. This is just plain-vanilla control theory.
One example of interpersonal conflictive control is arm wrestling, where two individuals try to pin their clasped hands to opposite sides of the table. … Another all too familiar example of conflict is war, which often occurs when two different groups – tribes, nations, etc. – try to occupy the same piece of land. In this case, the variable in conflict is who occupies the land, and the different reference states are the different ideas about who it should be. (pp. 113-14)
Yes, these are indeed examples of the purely conflictual variety of collective control. Still no problem from my perspective. In the next section of his chapter, though, Rick starts going way off track.
Conflictive control like this probably shouldn’t be called “control” since some — and often all — parties to the conflict are not getting what they want; They are not able to control the variable that is in conflict. In arm wrestling, when the clasped hands are not pinned to either side of the table or the other, neither wrestler is in control; when the hands are finally pinned to one side the winning wrestler is in control and the loser is not. The same applies to warring groups; the group that currently occupies the land is in control until it is displaced by the other group. But while some or all of the parties to a conflict are not in control, the conflict itself is a result of the controlling done by the parties to the conflict. So, paradoxically, controlling can lead to the loss of control. (Marken Ch. 7, Section 7.1.6, p. 114)
Say what? Control is only control when you’re winning, when you’re getting exactly what you want? What kind of control theory is that? Not the kind of control theory that I’m familiar with. As I understand it, control can never be perfect, there’s always a gap between the perception and the reference, and that error drives the control system’s output. The gap between perception and reference is an essential component of the control loop.
The dichotomous win/lose way of thinking that Rick exhibits here, it seems to me, is similar to some of the problems that Bill Powers used to warn about when trying to help control-theory newcomers to shed their assumptions based on old theoretical perspectives, which were getting in the way of understanding PCT. Bill consistently argued that control is a continuous analog process unfolding over time, rather than a digital change of state from one discrete category (like “winning” or “in control”) to another (like “losing” or “out of control”), which could happen instantaneously.
It looks to me like Rick has smuggled dichotomous notions of winning and losing into his description here by relying on common-sense understandings of arm wrestling rather than on any rigorous control-theory analysis of the interaction. It’s symptomatic that Rick doesn’t offer any control-theory model of how this interaction works to support his argument.
If we look carefully at control theory models, however, notions of winning and losing have no place in the analysis. Controlling is instead what living control systems do all the time, whether they happen to be winning or losing at any given moment. When living control systems stop controlling because their references and perceptions are all perfectly matched up, they’re dead (and gone to heaven, I presume).
Perfect control, with people getting exactly what they want, is an impossibility in a control-theory world. Take a look at this standard PCT simulation of a control agent bringing its perception from a zero starting point to a reference of 10.
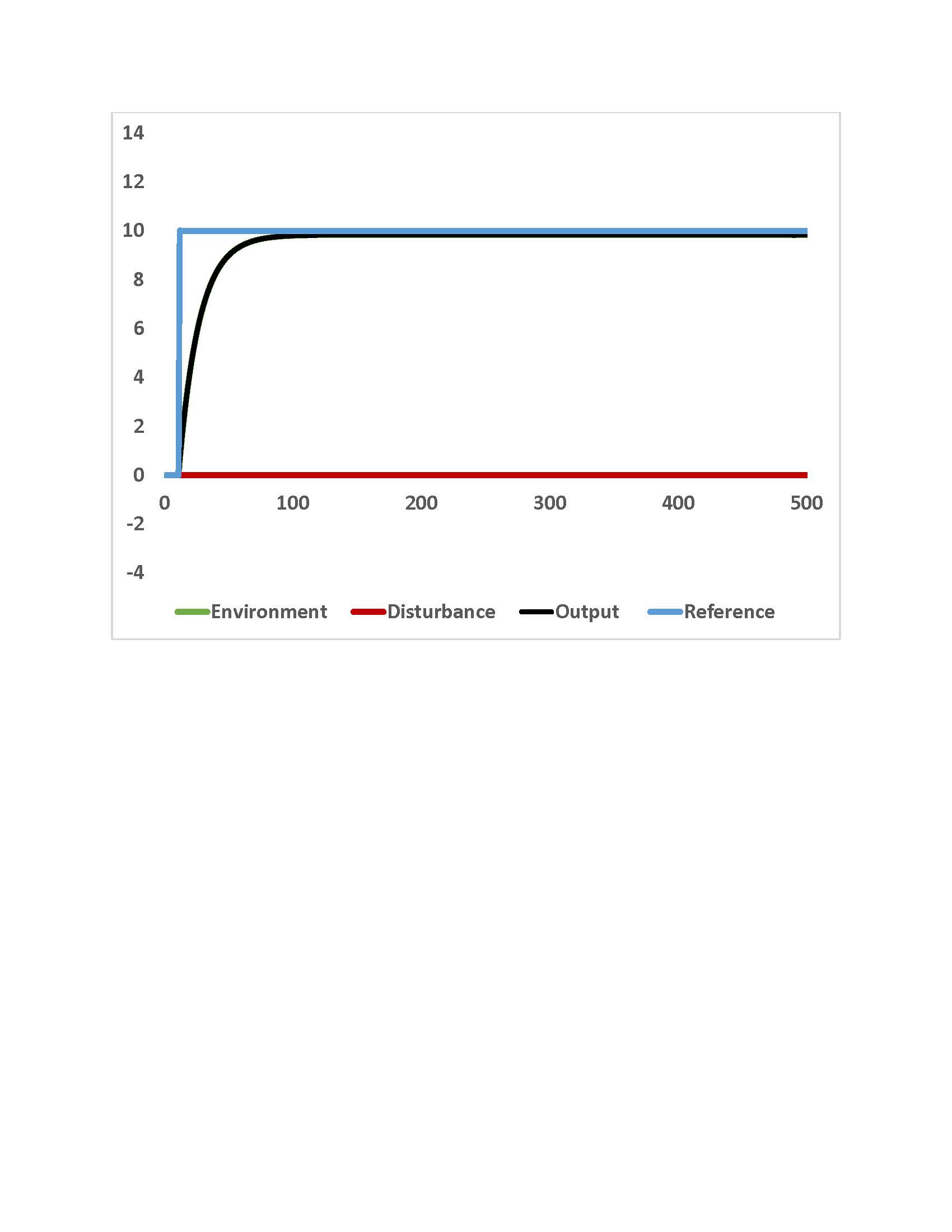
This simulation shows a single control agent with a loop gain of 60 operating in an environment with zero disturbances (the red line on the graph). The agent starts with a reference of zero for its perception of the environmental variable, but after a few iterations changes its reference level to 10 units (blue line on the graph). Since no disturbance affects the environmental variable, the only force acting upon it is the control agent’s output (black line), and the environmental variable exactly coincides with the agent’s output .
During the first 100 iterations or so, the agent’s output brings the environmental variable ever closer to the agent’s reference value, until it begins to reach an asymptote just short of the reference value, and then throughout the rest of simulation the environmental variable stays close to the reference line, with no appreciable change and only a small gap remaining. (This simulation assumes that the agent’s perception of the environmental variable is precisely accurate.) Thus, the control agent’s actions bring its perception of the environmental variable very close to its reference with only a minimal error, and the control agent achieves good, though not perfect, control of its perception.
Now look what happens when a random disturbance is added to the same simulation.
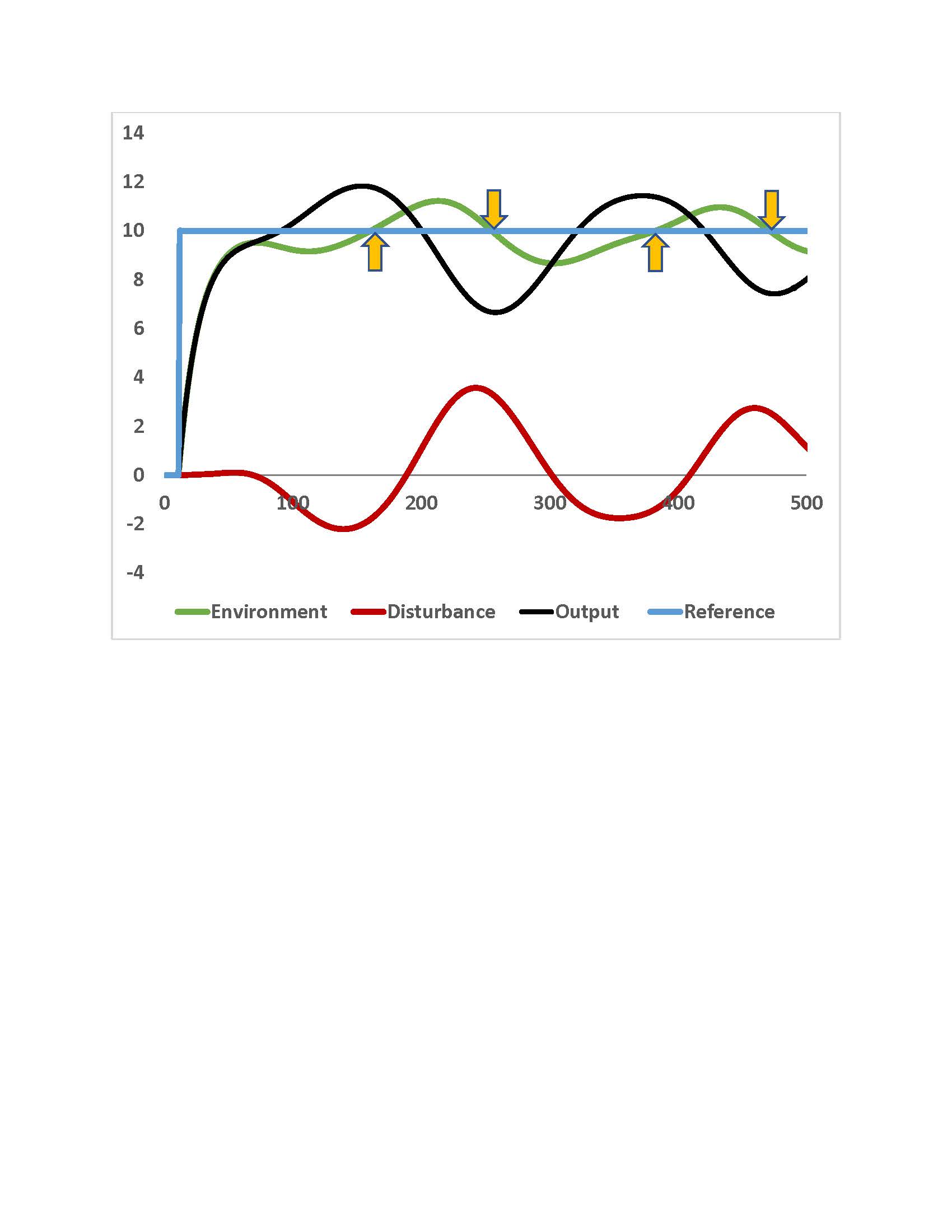
In this scenario, the random disturbance (red line) affects the environmental variable (green line), as does the agent’s output (black line), and the environmental variable no longer coincides with the agent’s output. Because of the disturbance, the environmental variable doesn’t stay as close to the agent’s reference (blue line) as happened in the previous example, but the environmental variable wanders instead from one side of the reference line to the other.
Is the control agent still in good control of its perception of the environmental variable? Yes. The variance of the environmental variable has been considerably reduced from what it would otherwise have been if the control agent weren’t acting, in which case the environmental variable would simply have followed the curve of the disturbance. The control agent’s actions have also caused the environmental variable’s track to center around the agent’s reference line (or more precisely, the asymptote that represents the best the agent can do to close the gap between its reference and perception, given its strength, i.e., loop gain). Again in this example, we see good control, but certainly not perfect.
Rick’s description of “winning” would suggest that a control agent is only “in control” when it gets what it wants, or in other words when perception and reference coincide. In this second simulation, the control agent does momentarily get what it wants on the four occasions when the green line of the environmental variable crosses the blue line of the reference value, as indicated by the yellow arrows on the graph.
Should we say that the agent is only in control at those specific moments and not otherwise? Absurd! The agent is controlling its perception throughout the simulation. Controlling is what control agents do. All the time. Whether the control is good or bad depends entirely on how much loop gain the control agent can muster. But having too much loop gain can be a problem, too, because it leads to instability (as I discussed in my presentation last October). Control agents like us have a tough life, because perfection always eludes us!
In summary, Rick’s description of the arm-wrestling scenario may sound plausible, since it fits nicely into our common-sense understandings of that kind of interaction, but it’s basically BS, because his explanation of what is going on has no foundation in the control theory that he claims to be presenting. Readers who take this chapter as a guide to doing research on “social control” should exercise great caution.
One further note: if wars like arm-wrestling are good examples of “conflictive control,” as Rick describes it, I don’t understand why he keeps complaining that he can’t think of any “real world examples” of what my model is doing. War is certainly a real-world collective control phenomenon, and we have seen many instances of wars that have gotten stuck in high-tension stalemates, just as I’ve often argued is exactly what my models would predict.
Take the Israeli-Palestinian conflict. Israel has been “winning” this war for several decades now, with incomparably stronger armed forces and much greater control exercised over the disputed territories. But the Palestinians, though clear losers in the conflict, nonetheless have kept on resisting with the weapons at their disposal: rockets, terrorist bombings of civilians, and so forth. And the Israelis, feeling they have to respond with ever-greater repression, still have not been able to get their perceptions to coincide with their references, to get what they want: a state of peace defined entirely on their own terms.
If Rick were a political scientist or historian, he would regard this kind of example as good hard data, certainly much more relevant to everyday life than the data from some experiment in a psych lab. Maybe it’s disciplinary myopia that keeps Rick from conceding that not everything can be studied by the methods of experimental psychology.
In the next section of his chapter on social control, Section 7.1.7, Rick discusses my work on collective control explicitly, and unfortunately he drifts yet further away from any well founded control-theory analysis. I’ll save my critique of that section of his chapter for another day.