···
From: Richard Marken [mailto:rsmarken@gmail.com]
Sent: Tuesday, June 13, 2017 7:54 PM
To: csgnet@lists.illinois.edu
Subject: Re: William T. Powers is dead - long live William T. Powers
[From Rick Marken (2017.06.13.1050)]
:
[Eetu Pikkarainen 2017-06-13 3]
EP: Rick, the end of your message sounds somewhat like ad hominem.
RM: Sorry about that. I didn’t mean to attack you personally but it was probably an unnecessarily rude way to express my irritation at your efforts to teach me PCT.
HB : You should be teached many more things not just PCT. By my oppinion Eetu should be teaching you PCT becasue he understands PCT and you don’t. See walking case.
RM : But I suppose now that Bill is gone everyone is an expert on PCT
HB : Not everyone. You and some members are exception. You don’t understand what PCT is about. Some others understand.
RM : … and there are no students so I apologize if I offended you. &nbbsp;
EP: But never mind, it is true that I am studying to understand PCT and you make it hard by using concepts somewhat inconsistently or at least strangely.
RM: Sorry. I try my best. But if you really want to understand PCT
HB : There is no doubt that you don’t understand PCT and Eetu understands. But you are trying to confuse him as you are doing this all the time here om CSGnet. You are confussion maker. It seems that you have these characteristics in genetics (your reference states).
RM : I suggest that a better way to deal with what you see as my poor explanations of PCT
HB : There is no better way. Your explanations are not just poor but are confussing, misleading.
RM : …is to ask questions rather tthan tell me what PCT actually says.
HB : You should remember what PCT usually says as this is GENERAL BASES FOR UNDERSTANDING PCT.
And what would you explain to Eetu about PCT.
Members on CSGnet should be asking you Rick about what is RCT (Ricks Control Theory) not PCT ? It’s obviously that you don’t understand PCT so it’s also clear that you shouldn’ be asked anything about PCT because you just make confussions.
Confussions you made are (see CSgnet archives) :
-
That »Behavior is control«,
-
that there is some »Controlled variable in environment,
-
that control is going into organism from environment through »Controlled Perceptual Variable«. Did I miss something ???
-
That everything in control loop happens at the same time
-
That there is some »Telekinesis«
-
That there exists some »Third eye«
-
That there is come extrasensory perception
-
That there is telepathy in controlling people
You turned a serious scientific PCT forum into Parapsychology and Occultims.
And maybe you’ll really manage to destroy it one day just because you don’t follow diagrams and Bills’ evidences about PCT. You just have to explain what Bill GENERALLY WROTE ABOUT PCT and you have to explain us what diagram LCS III is about. Is that so difficult ?
EP: Differentiation between reference state and reference signal is of course reasonable, but the core point is the reference value and it is only in the reference signal.
RM: See, this is where a question might have been better than an answer. All variables have values. So both the reference state and the reference signal have values.
RM : The value of the reference state of a CV is the observed value of the CV; the value of the reference signal is the value it takes on in the model.
HB : There is no »Controlled variable« or CV in environment and there is no »reference state« in environment too. And there is no comparator in environment, because simply behavior is not controlled so it doesn’t wear »references« and any other control characteristics. But from the effects of organisms internal control into environment you can make better or worse gues what is controlled in organism and what references in organisms are. But you can never observe »reference state« in environment. It’s only inside controlling system. But you can oberve the effects of control (reference states in orgsnims). Henry Yin put it well.
HY :
As a result of these conceptual confusions, in traditional models negative feedback is always misunderstood. Placing the comparator outside the organism has the unintended effect of inverting the inside and outside of the system (Figure 5).What should be part of the organism is considered To be a part of the environment, and what should be part of the environment, namely, the feedback function, is considered a part of the organism. Consequently, the equations that describe how forces act on loads and accelerations and decelerations of the loads are assumed to be computed by the nervous system [50]. These conceptual confusions have largely prevented any progress in the study of behavior for many decades.
HB : I know that you don’t understand the PCT mechanism how effects of control are transffered to environment. Your explanation is Telekinetic as you didn’t explain how behavior is controlled and how »control« enters environment.
Once you think right that there is no »controlled variable« in environment and once you think wrong that there is »controlled variable« in environment.
RM earler : The controlled variable is not in the outer environment; rather it is a function of physical variables that are in the outer environment; the function is called a perceptual function.
RM earlier : Ignoring the fact that I know that controlled variables are not in the environment,…
HB : What a confussion maker you are Rick. Contradictions, insinuations, imagination… These are you tools for connfussion making. When will you present some evidences that »behavior« can be controlled, and that there is some »Controlled Perceptual variable« ???
EP: I think state and value are in this kind of situation synonyms and so you seem to claim that the same reference value is both inside the subject and in the environment.
RM: The reference state has its value(s) and the reference signal has its value(s).
HB : Reference states are genetically defined in organism and can be seen in environment through effects of behavior on environment. The question is how. Is it with »Control of behavior« or with »Control of perception«.
Reference signal derives from reference state. It’s happening inside nervous system and control in organism.
Bill P :
REFERENCE SIGNAL : A signal inside a control system that specifies the state of zero error…
RM (earlier) : Sleeping is a tough one but I think it is controlling done by the autonomic nervous system that has the aim of keeping some intrinsic physiological variables in genetically determined reference states.
HB : Intrinsic physiological variables are kept in genetically defined reference states (see diagram on p. 191 B:CP, 2005). If you Rick would stick to this explanation of »sleeping behavior« you wouldn’t have any problems in explaining how people control 24/7.
RM : They are the values of two different variables, one an observed variable (the CV) and the other a theoretical variable (the reference signal).
HB : Reference signal is not just theoretical variable, it’s a nerv signal which exist in central nervous system.Â
You can »observe nerv signal« through instruments or measure it through nerv currents. There are methods today.
You can’t observe reference states in environment. You can’t see »reference states inside organism, but you can try to conclude from behavior (efects to environment) what could be reference states in organism mostly on yourself perceptual experiences and observing the effects of control in environment through actions that affect environment.
EP: What you see in the environment is not any reference value/state but rather some value/state which you infer (possibly by using some kind of TCV) to be constrained by a subject who is controlling its/his/her perceptions.
RM: See, this is what irritates me. Instead of asking me to clarify the concept of reference state you are telling me something about it as though you are the expert in PCT and I am the student.
HB : Eetu gave the exact relation. You are a student and he is PCT expert. At least he was until he get into discussion with you.
And what irritates me is that you are still confussing people with your RCT, where »behavior is control«, where there is some »controlled variable« in environment, where there is some »Perceptual Controlled Variable«. You understand what irritates me ??? You didn’t give any evidence that what you are saying is rellay PCT.
RM : And what you are telling me is wrong, “plain and simple”.
HB : No it’s just opposite. What you are telling is wrong, »plain and simple«
RM : When you do this it seems to belie your intention to learn PCT; apparently you believe you already have learned it and would now like to teach it to me. You can see how that might be irritating.
HB : I must say Eetu understands PCT and you don’t. At least you didn’t show any evidence that you understand it. He did.
RM: The fact is that your statement that " What you see in the environment is not any reference value/state" is just the opposite of what is true.
HB : Vauuu and what is true will now tell us master of RCT, because he is the only one who can see what is true in reality. Stop bullshitting Rick. What we see in environment is not any »reference value/state« but we can conclude what »reference values« are in orgsnism.Â
RM : In fact, what you see in the environment is the reference state of the CV.
HB : Vauu what a construct. What a statement which you already denied. There is no »controlled variable« in environment so it can’t be any reference value :
RM earler : The controlled variable is not in the outer environment; rather it is a function of physical variables that are in the outer environment; the function is called a perceptual function.
RM earlier : Ignoring the fact that I know that controlled variables are not in the environment,…
HB : How can be genetically determined values of reference states in organism transffered into environment ? Through »Control of behavior« or through Telekinesis ???
RM : This is one of the most fundamental and important things to understand about PCT.
HB : You mean the most fundamental and important things in RCT (Rikcs Control Theory) where outer environment is controlled to some reference state and there is no control ininside organism. I’m wondering how organisms manage to survive just with control of external environment ?
If you don’t like it coming from me, here it is from Bill Powers again:
![Inline image 1]()
HB : It’s taken from the context. But anyway here is not clear where these reference states are. They are always in organism. But they can be discovered experimentally. These »reference states« in organism always exist as organisms survives not matter of any theory.
![cid:image008.png@01D2E4DD.18598130]()
You should read further text. You many times proved that you manipulate with Bills’ text and that you don’t understand what you were reading.
But from further Bills’ explanation we can understand the existance of reference states.
Where do you see Bill mentioning that »reference states« exist in outer environment ? I can hardly beleive that Bill would contradict himself in relation to PCT definitions and diagrams.
His intentions were to prove existance of »reference states« in general to be in organism. The intention of the driver is to open the door as much as he pleased not to some specific angle (reference state). People don’t wear »protractors« to measure the angle of how much they will open the door.
Once behavior which is produced in organism can be defined in some disturbed internal variable (error signal), reference states can be recognized in organism. References (intentions) produce behavior not vica verse. Behaviors can’t produce »reference states« in environment. But through effects of behavior through environment we can conclude what these »reference states« in organism can be.
Behavior (output) is not controlled. It doesn’t carry any information about »control« or references into outer environment from organism but from »summed effects« we can conclude.
You have to prove that »Behavior is control«, but you didn’t till now.
I think that Bill only wanted to emphasize that we can conclude form observable relationships between behavior and control in organism that »reference states« exist and are of course in organism what follows form his all theory. Your interpretations shows high level of misunderstanding basic concepts of PCT.
Mostly other authors use »goal states« to describe »outer« states to which »Control of behavior« is tending. You are one of them. The concept of »goal states« is quite different from concept of »control« in relation to inner reference states in PCT. Outside goal states are mostly meant as states to which »controlled behavior« is directed. It’s behavioristic terminology and tendency.
But this is not the case in PCT. Gentically defined reference states are only in organism and can be identified with relationship to observed behavior and of course to our »knowledge« and experiences to what could be happening.Â
HB : Again. Your explanation of »sleeping behavior« is perfectly fitting into PCT diagrams and theory as its’ showing how reference states in the controlling system are present. So if you can succesfully explain 6-10 hours a day how they are controlling why you just don’t stick to it and explain all behaviors (generally) with Bills’ diagrams.
RM (earlier) : Sleeping is a tough one but I think it is controlling done by the autonomic nervous system that has the aim of keeping some intrinsic physiological variables in genetically determined reference states.
This desciption is in accordance to PCT. Everything what is concerned about PCT has to be in accordance with definitions and diagrams in PCT. Maybe somewhere in Bills’ literature it can be found some contradictions because Bill admitted that he changed his mind sometimes. See through CSGnet archives.
But in any of Bills’ diagram there is no »controlled variable« in environment so there is no control, no comparator, so there can be any »reference states« outside and no »Controlled Perceptual Variable« (CPV). In PCT theory generally speaking. Is just »Control of perception« and »actions« (behavior) that tend to alter perceptions.
Reference state can be doubtfull if we neglect the »fact« that in PCT »references« can be produced only inside controlling system. Behavior is not controlled and can’t produce references outside. It’s vica verse. References produce behavior with support of perception.
Whatever is happening in environment of the system can be supportable to control inside organism or not. So the organism will survive (managing to keep genetically defined reference state) or not. It depends also from what is happening in environment. That’s also what definition of control in PCT is about.
Bill P (B:CP):
CONTROL : Achievement and maintenance of a preselected state in the controlling system, through actions on the environment that also cancel the effects of disturbances.
HB : So how behaving system approach always to »the same state« or »homeostasis« under variety of unpredictable conditions to survive ? How orgnisms function to achieve and maintain predefined state (geneticall defined reference states). That is how LCS survive with of course support of behavior (ouptut) which also cancel the effects of disturbances. This is definition of control in PCT. The main process of control (achievement and maintainance of predefined state) is happening inside organism not outside. But from effects of output on environment observer can sometimes conclude what »references« for behavior could be. You can’t know all the time what people think and feel from just analysing behvavior. But you can gues sometimes, mostly on your experiences.Â
I’ve already proved to you Rick that Bill explained on the end of the chapter what control of openning the car door is about (see CSGnet archives). But no. Rick is trying to make confussion again. And it’s obvious why. If he keeps confussion on CSGnet his worthless articels and books will be maybe sold. He don’t care about PCT. He cares only about his »ass« what really good LCS with high gain should be doing. I understand him but I have to use PCT not RCT to understand his egoistic tendencies.
EP: For the conceptual clarity I suggest that the state in the environment which you call confusingly reference state should be called (by Fred) target state/value. Its definition is: “such a state in the environment which the controlling subject perceives with minimal error�.
HB : Dear Eetu. There is no »target« value in environment. Show me in any PCT diagram where you see GENERALLY »target« (controlled variable) in environment ??? Or even reference state in environment ?
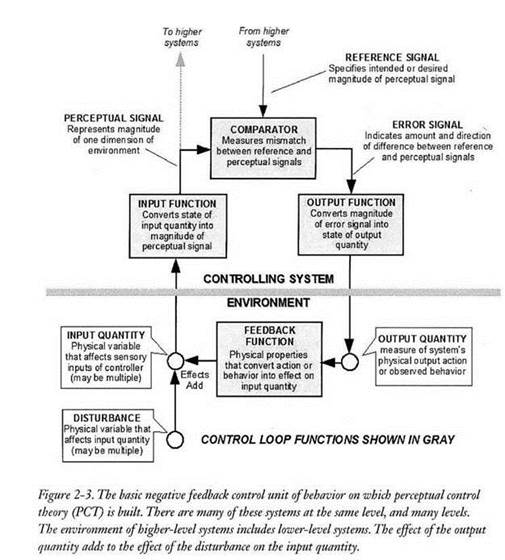
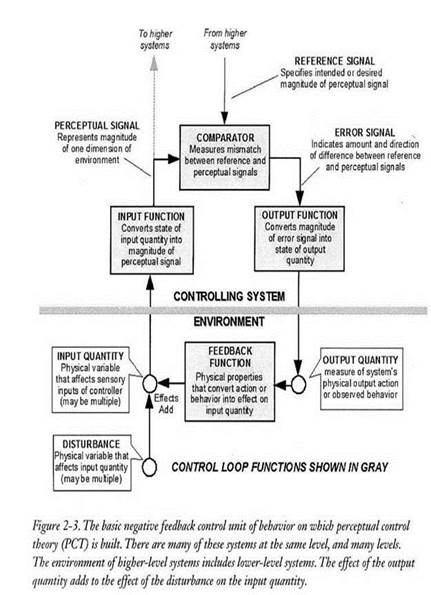
We need general theory, and in general PCT theory is just »feed-back« in environment – effects of output on input (see waalking case). Walking case or openning the car can be clearly explained by diagram LCS III but it can’t be explained by RCT.
![cid:image003.jpg@01D23694.7341FD90]()
HB : There is control only in organism to some genetically defined reference state and behavior that is supporting this control through »feed-back« as openning the car door and walking case is showing and mayn other cases.Â
RM: This is the theoretical explanation of the existence of reference states.
HB : It’s not just theoretical explanation. It is backed up by physiological evidences Bill offered. You just need to learn to read right.
So I see your attempts Rick as a little arranged so to make more confussion on CSGnet. You are just confussion maker Rick. You will never understand the essence of PCT and many other members also not because they are listening to you. But I can understand where your confussion is »springing«. Bill didn’t finnish diagram on p. 191. (B:CP, 2005). So I think that when that diagram is finnished you will undertsand everything more clear.
RM: But as you can see from what Powers says above, the reference state of a variable can be shown to exist without any reference to theory.
HB : Of course reference states in the controlling system exist without any theory because in this way organisms survive as reference states are genetically determined and without them there would be no organism and not control. Remember that control comes from genetic control systems.
Organisms would not survive with »reference states« in environment. See your sleeping case. Organisms survive for hours because they are controlling inisde to some reference states not outside. There is no reference states in environment.
RM (earlier) : Sleeping is a tough one but I think it is controlling done by the autonomic nervous system that has the aim of keeping some intrinsic physiological variables in genetically determined reference states.
HB : This is PCT explanation. And it’s general. So all you have to do is to transfer this defitniton to other behaviors and you are done. In this way you can prove that organisms can control 24/7 and stay alive.
You have to be precise in terms. Organisms survive only with achievement and maintainance of »reference states« which are genetically defined in the controlling system not outside.
Bill P (B:CP):
CONTROL : Achievement and maintenance of a preselected state in the controlling system, through actions on the environment that also cancel the effects of disturbances.
RM : Indeed, it is the objective existence of the reference states of controlled variables that is the reason Bill developed PCT.
HB : Bill proved and that’s what PCT is about that reference states objectivelly exist in organisms not outside. You are so good at manipulating with words, that I’m not surprised how some members can »buy« your bullshitt. The reason why PCT was developed is to make a general theory :
Bill P. at all (50th Anniversary, 2011) :
Perceptual Control Theory (PCT) provides a general theory of functioning for organisms.
HB : You agreed with it. Don’t contradict yourself.
Best
Rick
Eetu
Lähettäjä: Richard Marken [mailto:rsmarken@gmail.com]
Lähetetty: 12. kesäkuutata 2017 22:53
Vastaanottaja: csgnet@lists.illinois.edu
Aihe: Re: William T. Powers is dead - long live William T. Powers
[From Rick Marken (2017.06.12.1250)]
Eetu Pikkarainen (2017-06-12)-
EP: The issue is ONLY that we do NOT control anything in the environment but only our own perceptions - even though the control is realized by affecting the environment.
RM: This is simply not true. See my recent post to Martin. I’ll just repeat my last point: If people controlled only their perceptions then there would be no way for anyone other than the person doing the controlling to know this.
EP: I think you partly replied on behalf of in your message [From Rick Marken (2017.06.11.1640)] but only partly. You wrote:
RM: “a controlled perception is an inference based on observation of the fact that certain variables in what is perceived by an observer as the subject’s environment are controlled (maintained in reference states, protected from disturbance).â€?
EP: This means that an observer sees something special happen in the environment and from that s/he infers that the subject is controlling some perception.
RM: Right. The “special” thing that is seen in the environment is that a variable is being controlled (maintained in a fixed or variable reference state, protected from disturbance). For example, we can see that people are controlling for being upright as they walk over irregular terrain (the disturbances). We infer that they are doing this by controlling (among other things) a perception of the location of their center of gravity)
EP: As part of that inference the observer can do tests and try to disturb the subject’s controlling.
RM: I would say that the inference is the theory of how this control occurs: PCT. The testing that then occurs involves determining what perceptions that are being controlled that are the basis of this observed control: is it perceived center of gravity, perceived visual orientation with respect to the ground, etc.
EP: What the observer is seeing is not control, but stabilization, see below…
RM: No, if they see a variable being maintained in a fixed or variable reference state, protected from disturbance, then they are seeing control. Stabilization is not control. In stabilization (as in a mass-spring system) there is a stable (“equilibrium”) state of a variable that could be seen as a reference state but the variable is not protected from disturbance when it is in this state.
EP: Question is about the definition of control in PCT.
RM: The definition of control in PCT is completely in terms of observable variables…“Perception” is not part of this definition; perception is a component of the theory that accounts for this objectively observable phenomenon.
EP: Perception may not be a part of the definition, but the reference is.
RM: Yes, the reference state is part of the definition of control. The reference state is an observable state of the variable. The reference signal in the PCT model accounts for the constant or variable reference state of the variable that is observed.
EP: Like perception, also the reference is only inside the subject / organism.
RM: The reference signal is inside the organism; the reference state is outside the system.
EP: So the definition of control (in PCT) cannot be defined completely in terms of observable variables.
RM: Again, this is “plain and simple” untrue not a lie because I"m sure the error is unintentional).
EP: When you see (the fact) that something is (in a certain way and conditions) stabilized in the environment of the subject, you can infer from that to (the fact of) control. It is like all science a hypothetical and fallible inference, but by experience a more reliable inference than many everyday alternatives. That is just the glory of science: you can know something what you have not (immediately) perceived.
RM: I appreciate your enthusiasm for PCT, Etau, but I think, at this point in your PCT learning curve, it would be wise for you to take the advice of our recent American winner of the Nobel Prize for Literature and “know your song well before you start singin’”.
Best
Rick
–
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
–Antoine de Saint-Exupery
–
Richard S. Marken
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
–Antoine de Saint-Exupery