[Martin Taylor 2015.05.06.15.18]
[From Rupert Young (2015.05.06 20.30)]
You assume correctly, and thank you.
As you say there's no replica, and neural structures implement of the outer world.
Some presumably do, some have other functions of many different
types.
Though perhaps you mean perceptions are models of the
outer world?
Not necessarily. I have said that I consider the complete set of
perceptions at any moment to be a model of the current state of the
world, but the question you raised in the previous iteration of this
exchange has led me to restrict this, because some perceptions are
clearly not of the outer world. You provide examples later in the
message to which I am now responding.
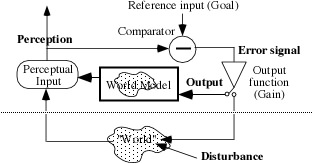
A "World Model" in the sense I have been using it is a process
model, which, given the state of the world and some imagined action
on it, produces the flow of perceptions that would (as imagined)
occur in that world. My problem now is that I had previously
presumed the “world” in question to be the one to which the organism
had reorganized, but you made me realized that the modelled world
could have any imagined properties, and if those properties don’t
correspond to the ones for which we reorganized, then using the
existing structure of the hierarchy won’t work, and we would need to
entertain the possibility that an explicit world model can be built
and retained and used somewhere in the brain. Maybe you would think
of such a model as a “replica”; I wouldn’t, because I think
“replica” has connotations that wouldn’t be appropriate.
But
there is a replica in the sense that the imagined actions on
the outer world result in the perceptions that those actions
would produce if executed in the outer world (though usually
on a much shorter time-scale).
This, it seems to me, could be called a replica of perceptual
control but not of the outer world. I could imagine myself
closing a door and imagine actions that would result in a
closed door. But these “imagined actions” themselves are
perceptions (perceptions of actions). There is no need to
invoke “World Models” to explain this.
So how do you imagine a door closing so as to produce the same
perception as a closing door would have, if you don’t have a
model (which I claim to be in the form of all the connections
you have reorganized as you have learned to control such things
as a perception of a door closing)? What kind of magic produces
this perception? A “World Model” produces perceptions.
So does an associative memory system (already part of the theory)
so why need a “World Model”.
Don't confuse implementation with function. Associative memory has
been very much in my underlying thinking of how a World Model might
be implemented.
Anyway, as I have said many times, I previously thought of the
“World Model” as a consequence of the existing theory, not as an
addendum requiring a new construct. To me, it was just the way the
imagination connection would have to work. The only new thing was
that Bill in 1993 hadn’t seen it that way, but in 2010 he seemed to
be coming around to this way of looking at it (though Rick
disagrees).
No, I am thinking of dynamic processes as in PCT.
Again you appear to be talking about two different types of
models here. External models where the purpose is to replicate
internal dynamic processes. And internal models of external
processes. I do not see the case for the latter.
They aren't different. When you actually control in a tracking
experiment showing the task on a screen and using a mouse to
move a cursor on screen, you don’t act randomly, flailing at the
air, yelling and rolling your eyes before happening on the mouse
and discovering that it influences the cursor and helps you
control. You don’t reorganize to control every perception. You
have done that already. You have a model inside you of what it
taked to move that cursor on screen, and that model includes
finding a mouse, holding it, and moving it. You don’t even have
to imagine it, though you may. You are using a model you have
already built.
Sure, your system has reorganised to select the appropriate goals
(perceptions), but I don’t see any support for the case that this
constitutes a “World Model” in that it is replicating actual
dynamic processes of the world.
I'm not clear what you are getting at in this comment. The "World
Model" you use in going straight to the appropriate control action
at the many levels needed to select “mouse”, get your hand on it,
and move it usefully don’t replicate the dynamic processes of the
world. They produce the perceptions that you need in order to be
using the mouse, and those perceptions do depend on the dynamics of
the world.
The property of "tasting like lemonade" is a
property of the perceiving system not of the external world.
It can’t be said to model the world if there is nothing in
the external world to model.
Can you get the taste of lemonade from what's in a glass from
which you are drinking, if what is in the glass is gasoline? Can
you really say there’s nothing in the properties of the glass
contents that our perceptual functions convert from sensory
input into the taste of lemonade? I think that’s a ridiculous
proposition, or one that if you are to be consistent about it
must apply to every one of our perceptions. There is nothing in
the sensory input that corresponds to, say, colour, or even
light intensity. To say that there is nothing on the external
world corresponding to “perception X” is a solipsistic copout.
And I say this knowing that Bill Powers made that claim.
How about if all animals were suddenly to die, or if we went back
a few billion years before animals existed would you still say
that there were still a property that exists which corresponds to
“perception X” (or any other perception)?
Does a tree make a noise if it falls in an empty forest? The answer
is the same. It depends on whether you are talking about imagined
sound waves (or whatever environmental properties are involved) or
on the existence of perceptual functions that create specific
perceptions from those sound waves or property sets. Do you have the
same “taste of lemonade” as I do? There’s no way I could tell. But I
could do a Test fot the Controlled Variable along the lines of the
coin game, and try different chemical structures and/or material
processing procedures, and see whether you said “Lemonade” for the
same liquid as I would say had the taste of lemonade. I couldn’t do
that with a fossillized animal, or even a dog.
I ask you to think about what you do when you are confronted
with a problem – to make it specific, imagine you are on a
mountain road with a river far below, and you are confronted by
a recent rockslide that blocks the road. Do you not then model
things like “If I move that rock, more will come tumbling down”
“If I try to turn round, I may fall off into the river down
there” “Could I maybe use some of the rocks to shore up the
cliff above while leaving enough room for the car to get around”
“What happens if I try to walk, leaving the car here” and so
forth. Is this a violation of PCT, or does one simply not do
anything of that kind, ever?
That sounds like just a program-level perception in operation.
What does a “world model” give you that the perceptual hierarchy
does not?
Again I ask you to think about this situation. Where does the
program-level perceptual function get its structure and its data
from? It get’s its structure from reorganization and experience with
piles of things that may fall down if you move an item from the
bottom of the pile. That’s a component of the kind of “World Model”
I was thinking of until a couple of days ago. Where does the data
“I’m moving that rock in my imagination” come from that enters
this program-level perception, and how does it then get the data
“No, I’ll move this rock” or “I’ll try to edge the car around the
rockfall” or “I’ll walk”, all of which may be nearly simultaneously
tested in what I call the “World Model”.
To belabour the obvious, my new problem is that I can imagine the
rocks being as light as a feather and loose enough for me to blow
them away, or that my car had a gear that made it float up and over
the fall, or that rocks are repelled by cars, which would allow me
to drive through the fall, as the rocks flow over and around the
car. Those possibilities do not come from my experience with cars or
piles of rocks.
Another thought; if a model is a model of the world then it could
only produce things that the world could produce, so a
perception-producing “world model” would need to account for
perceptions that do not and could not exist in the real world,
such as imaginary concepts and events, especially during dream
time.
Yes, that is exactly the problem I was posing in my last message, to
which I have hearkened back a few times in this message.
Whatever is producing these perceptions is not a
model of the world,
Really???
but an associative memory system is quite consistent
with this, I would say.
Why the word "but"?
Couldn't you say: "Whatever is producing these perceptions is a
model of a non-existent world, in the construction of which the
actions of associative memories play a significant part"?
Martin
···
I’m replying to the list as I assume
you meant to send it the all.
(Martin Taylor 2015.05.04.13.38
such as you may have a model of the Flying
Scotsman in your train set. So a “World Model” would be a
replica of the world, that is, stuff outside of the
perceiver; the objective world.
There's no replica in the sense that the neural structures
that implement perceptual control of perceptions of the
outer world most certainly don’t work the same way as the
outer world seems to do. Neural impulses are not the same as
masses accelerated by forces.
I'd agree there, but this would indicate that there isn't a
“model”.
Why?
perceptions