RM: Some recent comments on CSGNet reflect a misconception about PCT that I think is worth addressing, even at the risk of suffering the slings and arrows of outrageous opposition.
RM: The misconception is that “control of perception” implies that a controlled variable – the external correlate of the internally controlled perception – is controlled only as a “side effect” of controlling that internal perception. This notion is reflected in the following three comments made to CSGNet:
FN: I believe our actions affect external variables but we only control our perceptions of them. If there is a high degree of correspondence then for practical purposes we control the external variable too. But we don’t control it in the sense that control is used in PCT.
WM: …So controlling perception internally is paralleled simultaneously by controlling ‘something out there’ as indexed by the computer data. Rather than eschewing external control for internal control in a binary debate as you wish to do, I would propose that both views are simultaneously true when a system is controlling well…[emphasis mine: RM]
EJ: This is why I try to make the distinction that a) only perceptions inside the organism can be controlled, and b) something in the environment seems to get stabilized (we presume), in spite of disturbances pushing it in other directions.
RM: All three statements take “control of perception” to mean that we control only internal perceptions and not the external correlates of those perceptions – the controlled variables. The observed behavior of a controlled variable is just a side effect of control of the perceptual correlate of that variable. This leads to the notion that the observed behavior of controlled variables can give a misleading picture of the perceptions a behaving system is actually controlling.
RM: The actual PCT view of the relationship between controlled variables (CV) and and controlled perceptions was succinctly stated by Powers in a comment to CSGNet that I posted earlier:
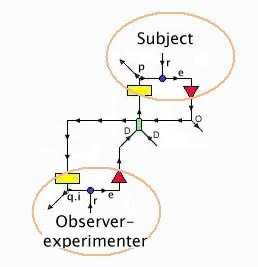
[From Bill Powers (990331.0033 MST)] “The CV” is the observer’s perception. However, if the observer happens to be using a perceptual system closely similar to that in the behaving system, it is possible for the observer’s perception to covary with the behaving system’s perception. Then the observer will see that the CV is protected from disturbances by the actions of the behaving system, and the CV will pass all the parts of the Test.
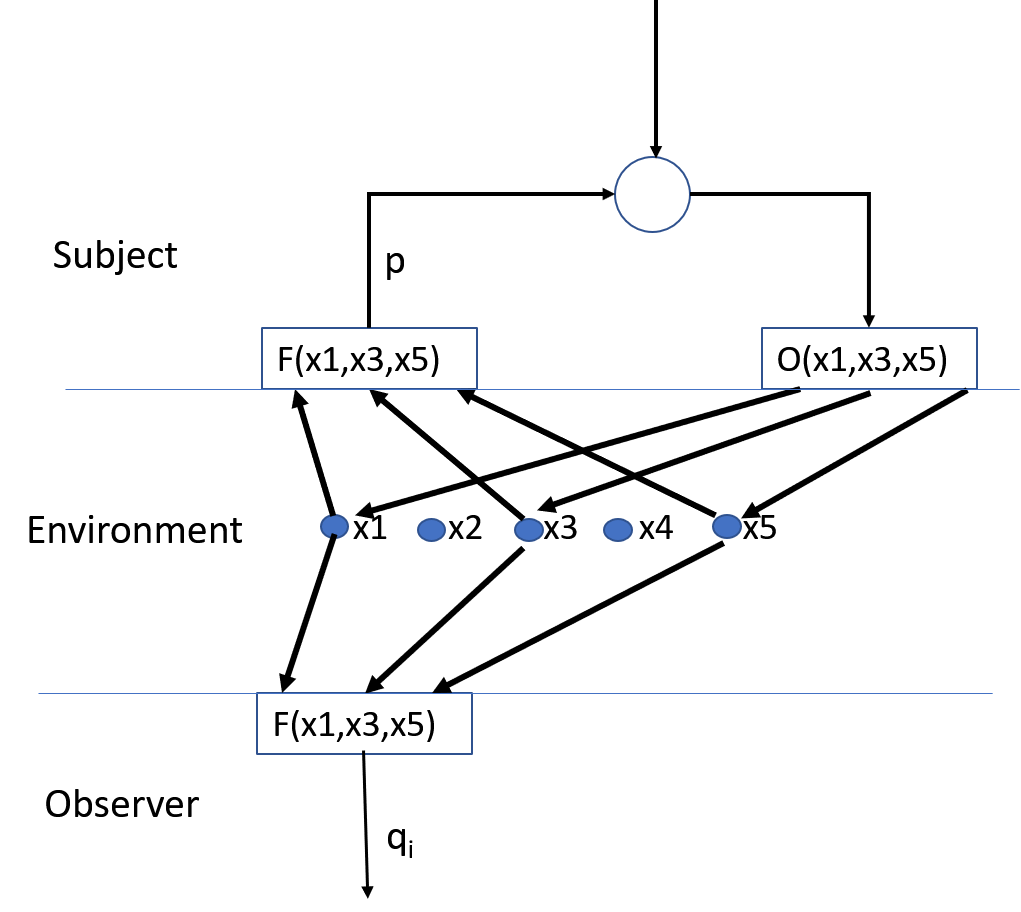
RM: What Bill is saying here is that the controlled variable – the external correlate of the controlled perception — is itself a perception! The CV is not an “external variable”, “something out there” or “something in the environment” that is being controlled as a side - effect of controlling a perception. The CV is a perception in the observer that is exactly equivalent to the perception controlled by the behaving system when it covaries with the perception being controlled by the behaving system. This equivalence will be seen then the observer’s perception of the CV “… is protected from disturbances by the actions of the behaving system, and [passes] all the parts of the Test”.
RM: The observer’s CV perception can be equivalent to that of the behaving system only if “…the observer happens to be using a perceptual system closely similar to that in the behaving system”. So a human observer will be using such a perceptual system when the behaving system under study is another human. When the observer is a human and the system under study is another species the human may have to use a different kind of perceptual system to perceive the CV that corresponds to the perception being controlled by the behaving system; for example, a human observer can perceive the variables controlled by bats doing echolocation using sonar devices that can detect very high frequency sounds.
RM: Bottom line: Control of perception means control of perceptual representations of aspects of the outside world known as controlled variables. Any observer with access to a perceptual system similar to the one in the behaving system can monitor the perceptual variables that that system is controlling. The observers who do this are called PCT researchers.
RM: I think I’ll post this to the IAPCT Discourse site under the topic “Controlled Variables are Perceptual Variables”
Best
Rick