Let me reiterate or make more explicit four things intended by the dyadic diagram.
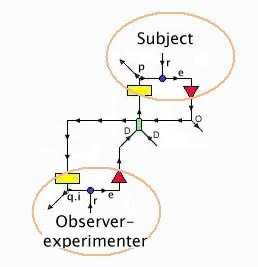
- It is essential to include the second control system, the observer-experimenter. This is obvious in the agreement that q.i is the observer-experimenter’s perception. In addition, d rather than o is the observer-experimenter’s control output, and d is in conflict with the subject’s control. The diagram should include higher levels. At the relationship level is control of the conflict d, control at the sequence level limits that conflict to just enough to observe the subject’s resistance to d, and control of a principle of science verifies by doing this more than once. Related principles try alternatives and try to falsify the hypothesized CV. This is all implicit but relevant, just as higher levels governing the subject’s control of p are implicit but irrelevant to the immediate test.
- There is no claim that the little green rectangle is present in the environment as perceived. In the diagram, it represents the experience of perception by the subject and the experience of perception by the observer-experimenter. We conveniently talk of this as their projection of their perception into the environment or their assumption that their experienced perception is in fact that which they perceive.
- To include in the diagram micro-variables that the physical sciences say are present in the environment (air pressures, etc.) we would have to include at least one Scientist control system controlling those perceptions. The absence of this, and its irrelevance to any diagram of the TCV, makes it obvious that in practice we do not take any account of such micro-variables in PCT experiments. We resort to imagining them, on authority of epistemologically prior sciences (physics and chemistry are customarily invoked), only in these philosophical discussions of what is really real and what in the environment is affected by disturbances and control outputs such that a perception is controlled. Let us be clear that these are discussions of the philosophical implications of PCT that have no immediate relevance to doing science.
- To say that the TCV is predicated upon the subject and the observer-experimenter having like-structured perceptual input functions would make impossible PCT research on living things other than humans, and denies variation of perceptual input functions across the human population and between individuals. It is essential to the TCV to reconstruct a perception of the subject’s perception from the subject’s point of view. Mere assumption is not enough. This is increasingly the case as we investigate perceptions higher in the hierarchy.