Thanks for the detailed response, Boris. To cut to the chase, I think I agree with your questions at the end. Now I have a question for you:
Do you agree that in order to control our perceptions our behavior must affect that which we perceive?
It seems to me that if our output (behavior) is to affect our input (perception) the feedback loop must connect our output to and some variable in the environment. If not, there’s no way to control our perceptions.
···
From: Boris Hartman [mailto:boris.hartman@masicom.net]
Sent: Tuesday, August 22, 2017 1:28 PM
To: csgnet@lists.illinois.edu
Subject: RE: Dealing with the limitation of only positive neural signals
Hi Fred,
Please if you consider all other evidences that show that only »Perception is controlled«. By choosing rare examples when Bill could »change his mind« (he admitted that some times our discussion is useless. You see only that very rare places where Bill could make a mistake.
So consider which evidences prevail. And please read our discussions with Rick because I’m tyred of repeating evidences so many times. I hope you understand…
<
From: Fred Nickols [mailto:fred@nickols.us]
Sent: Monday, August 21, 2017 6:16 PM
To: csgnet@lists.illinois.edu
Subject: RE: Dealing with the limitation of only positive neural signals
[From Fred Nickols (2017.08.21.1202 ET)]
Boris:
From the Glossary of B:CP, 2nd Edition (2005) page 296:
CONTROLLED QUANTITY: An environmental variable corresponding to the perceptual signal in a control system; a physical quantity (or a function of several physical quantities) that is affected and controlled by the outputs from a control system’s output function. Boris, please note Bill’s use of “controlled by.�
HB : This is true and I once gave my interpretation. This is a very rare place in Bills literature where Bill used “control� and environment. But which environment is meant here ? You can make your own interpretation. And beside that this is the only place among other definitions of control loop that Bill is using “control and environment�. This is no proof that “controlled variables� are in environment, because according to other definitions in B:CP outer environment is affected by output, not controlled.
So I assume “control of environmentâ€? can be only possible if we assume that Bill use it for internal environment which is controlled (temperature, concentrations of ions…). So
<
“affected and controlledâ€? could mean that internal environment is controlled as you will see it in definition of control… and outer environment iis affected…
Bill P (B:CP) :
CONTROL : Achievement and maintenance of a preselected state in the controlling system, through actions on the environment that also cancel the effects of disturbances.
HB : There is no doubt that control in PCT is meant for internal environment not external. Actions through environment can be to both environments where disturbances are cancelled. But control is going on just in organism (in the controlling system).
You and Rick are to much orienting to external environment where you can see the effects of internal control. But that’s not control.
By one unclear case you can’t conclude on whole theory. Other definitions in B:CP show that there is no control in outer environment. So there is no control in outer environment. Inner environment of LCS is controlled to certain constant conditions. Here are other definitions of control loop. Show me where you see that outer environment is controlled.
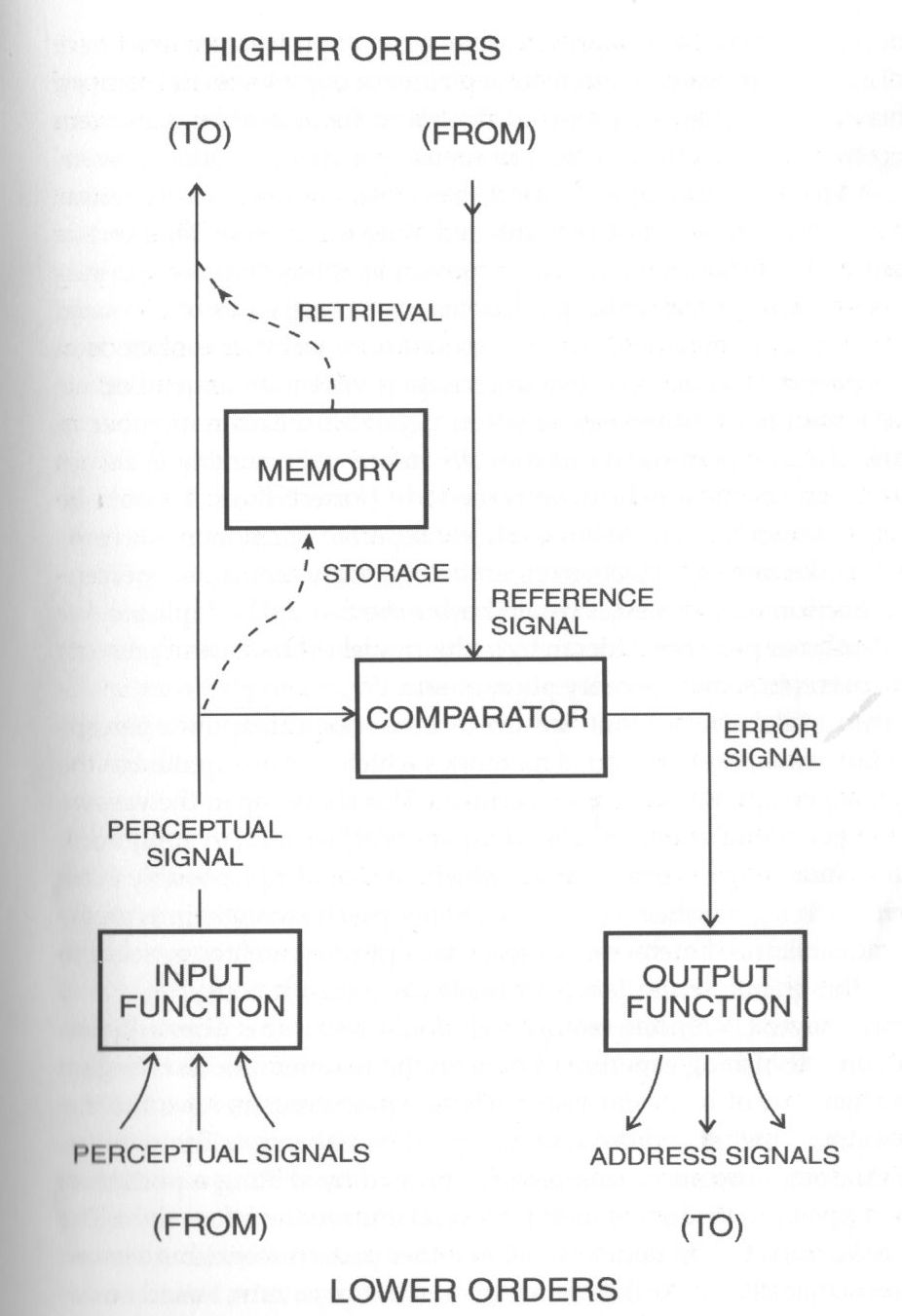
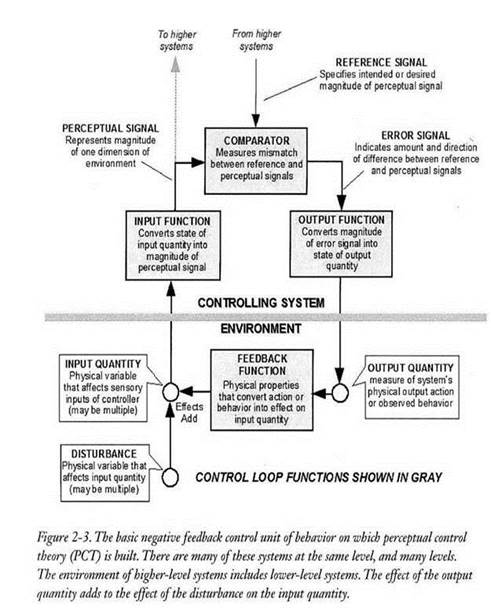
»PERCEPTUAL CONTROL LOOP« of PCT (Perceptual Control Theory) look like this :
Bill P (B:CP):
- OUTPUT FUNCTION : The portion of a system that converts the magnitude or state of a signal inside the system into a corresponding set of effects on the immediate environment of the system
(LCS III):…the output funnction shown in it’s own box represents the means this system has for causing changes in it’s environment.
Bill P (LCS III):
- FEED-BACK FUNCTION : The box represents the set of physical laws, properties, arrangements, linkages, by which the action of this system feeds-back to affect its own input, the controlled variable. That’s what feed-back means : it’s an effect of a system’s output on it’s own input.
Bill P (B:CP) :
- INPUT FUNCTION : The portion of a system that receives signals or stimuli from outside the system, and generates a perceptual signal that is some function of the received signals or stimuli.
Bill P (B:CP) :
- COMPARATOR : The portion of control system that computes the magnitude and direction of mismatch between perceptual and reference signal.
HB Definition and other loop sequences of control loop are inevitably showing it’s connection to state in the controlling system. And other are in accordance to it.
CONTROLLED QUANTITY is also on some places defined in B:CP (2005) so it makes it more clear.
Bill P (B:CP, 2005):
Consider once again the meaning of the term controlled quantity. A controlled quantity is controlled only because it is detected by a control system, compared with a reference, and affected by outputs based on the error thus detected. The controlled quantity is defined strictly by the behaving system’s perceptual computers; it may or may not be identifiable as an objective (need I put in quotes?) property of, or entity in, the physical environment. In general an observer will not, therefore, be able to see what a control system is controlling
And there are quite some explanations of “controlled quantity� in other Bills literature.
Bill P (LCS I) :
Every Living Control System must have certain major features**.** The system must be organized for negative (not positive) feedback, and it must be dynamically stable – it must not itself create errors that keep it huntingg about the final steady state conditions. The Living Control System of this kind must sense the controlled quantity in each dimenssion in which the quantity is to be controlled; this implies the inner model of the quantity in the form of a signal or set of signals. It must contain or be given something equivalent to a reference signal (or multiple reference signals) which specifies the »desired« state of the controlled quantity that is to be controlled. The sensor signal and the reference signal must be compared, and the resulting error signal must actuate the system’s output effectors or outputs. And finally, the system’s output must be able to affect the controlled quantity in each dimension that is to be controlled. This makes the action the clearest. The system, above the dashed line, is organized normally so as to maintain the sesnor signal at all times nearly equal to the reference signal even a changing reference signal. This is how control is achieved and maintained. The sensor signal and input quantity become primarilly a function of the reference signal originated inside the system.
HB :
I hope you noticed that controlled quantity is used in “future tense� so it will be controlled after it is affected in environment. Comparator is the only place where control is going on. Other function are important but supporting.
The last time I forgot to put one more evidence that “Behavior is not control�.
Henry Yin (article) :
4.2. Control of Input. A control system always controls its input, not output [7]. Only perceivable consequences of behavior can be controlled.
According to mainstream engineering control theory, a control system controls its outputs, not its input. This is perhaps the most common fallacy today, both in engineering and in the life sciences [49, 55, 56]. This fallacy, an unfortunate legacy of cybernetics, is the result of imposing the perspective of the observer rather than using the perspective of the organism or controller. The mistake is to assume that what the engineer perceives and records, the “objective� effect of the system, is the output of the system.
HY :
As a result of these conceptual confusions, in traditional models negative feedback is always misunderstood. Placing the comparator outside the organism has the unintended effect of inverting the inside and outside of the system (Figure 5).What should be part of the organism is considered to be a part of the environment, and what should be part of the environment, namely, the feedback function, is considered a part of the organism. Consequently, the equations that describe how forces act on loads and accelerations and decelerations of the loads are assumed to be computed by the nervous system [50]. These conceptual confusions have largely prevented any progress in the study of behavior for many decades.
HB : Now all I’m asking you is to find one Bills diagram with “controlled variable� in environment. If you will not find it there is no controlled variable in environment in PCT and there is no “Control of behavior� which could control “controlled variable� and there is no “Controlled Perceptual Variable� called CPV by Rick Unless you want to introduce “New force� that can control “controlled variable� in environment� and that is Telekinesis.
There is just “Control of perception�. Perception is the only “controlled variable�. I’ll repeat Ruperts’ opinion fro I don’t know which time :
RY earlier : Sure, a perceptual signal (q.i*g) may correspond to, or be a function of, variable aspects of the environment (q.i) but it is the perceptual signal that is controlled not the variable aspects of the environment.
RY : To control the perception of the sweetness of your lemonade you vary the amount of sugar until the desired sweetness is realised.
Fred if you want to believe that “Behavior is controlâ€? it’s your problem. Feel free to do it so. But it would be good if you would become “fierce defender of PCTâ€?…
So please answer me :
-
Do you agree with Bill and Mary Thesis about PCT ?
-
Do you agree that Bill gave right explanation of “muscle tension� in B:CP ?
-
Do you agree with diagram in LCS III ?
-
Do you agree with PCT definition of control ?
-
Do you agree with Henry Jin explanation of PCT and confusions about “placing the comparator� in outer environment ?
-
Do you agree with Rupert Young ?
If you don’t agree write why you don’t agree. So I’ll wait for your answers.
Best,
Boris
In the diagram you included below, the controlled quantity is the input quantity. If, as Bill indicated, the controlled quantity is an environmental variable, then I see little difference between “controlled quantity� and “controlled variable.�
When Rick uses “controlled variable� I understand him to mean the controlled quantity or input quantity, which is what Bill spelled out. (If Rick doesn’t mean that, let him say so.)
You also say that the error signal is the result of the control of perception. I don’t see it that way, Boris. So far as I know, an error signal is the result of comparing a perceptual signal with a reference signal. Any difference between the two creates an error signal which leads to output that affects the controlled quantity or input quantity and thus alters the perceptual signal. The output, behavior, serves to control the input, perception. Hence the title of Bill’s book: Behavior: The Control of Perception.�
Fred Nickols
From: Boris Hartman [mailto:boris.hartman@masicom.net]
Sent: Monday, August 21, 2017 11:56 AM
To: csgnet@lists.illinois.edu
Subject: RE: Dealing with the limitation of only positive neural signals
Hi Fred
From: Fred Nickols [mailto:fred@nickols.us]
Sent: Monday, August 21, 2017 1:50 PM
To: csgnet@lists.illinois.edu
Subject: RE: Dealing with the limitation of only positive neural signals
[From Fred Nickols (2017.08.21.0746 ET)]
Boris:
The other day you asserted that behavior is not control. This was tied to my use of a quote from Alex’ book chapter.
Given that you are such a fierce defender of PCT per Bill Powers,
HB : Thanks you for noticing that Fred. I can’t deny this “fact� JJ. But I’m said as it seems that I’m the only one.
FN : …I don’t understand why you would object to the asssertion that behavior is control.
HB : I object to the assertation that “Behavior is control� because of the consequences it takes. If “Behavior is control�, then there is some “controlled variable� in environment, and there is some “Controlled Perceptual variable� or CPV and so on. These are things that don’t exist in PCT. It’s RCT (Ricks’ Control Theory).
FN : After all, Bill’s seminal work is titled “Behavior: The Control of Perception.� That’s the same as saying “Behavior is control of perception� and, more succinctly, “Behavior is control.�
HB : Sorry Fred to say but it seems to me that you are simplifying too much.
“Behavior : the Control of Perception� is more look like “Behavior is result of Control Of Perception� what you can clearly see from diagram (LCS III) where behavior (output) is activated by “error� signal which is result of control of perception.
![cid:image002.jpg@01D2E396.F40C1DC0]()
Even if you make conclusion that “Behavior is Control of Perception� it sounds more as “Behavior coming after control of perception�. How can you conclude that “Behavior is controlling perception� ?
But saying “behavior is control� you need physiological evidences that muscle tension can be controlled, what was clearly proved by Bill that is impossible. If you think that he was wrong than be it so.
FN : So, Boris, please clarify: What is your objection to saying that “Behavior is control�?
As I said above :
-
“Behavior is control� leads to wrong RCT theory which all elements are not present in PCT. I presented it so many times that you probably know it.
-
Bill gave physiological evidences (see B:CP) that direct muscle tension control is impossible without proprioception and other perception sources. Maybe somebody can prove that he was wrong.
-
In PCT “Output� is not defined as “Controlled output� or “Controlled effects� to environment as Rick is trying to present it. There is no “controlled effects� to environment thus “Behavior is not control�.
Bill P (B:CP):
OUTPUT FUNCTION : The portion of a system that converts the magnitude or state of a signal inside the system into a corresponding set of effects on the immediate environment of the system
LCS III :…the output function shown in it’s own box represents the means this system has for causing changes in it’s environment
- Afterall we are on CSGnet forum which I assume is dedicated to Bill and Mary and PCT which main conclussion is “Control of Perception�.
Mary Powers :
PCT requires a major shift in thinking from the traditional approach : that what is controlled is not behavior, but perception.
Bill Powers :
In order to control is absolutely necesary to perceive. Our senses and further neural equipment that builds abstract perceptions out of simple ones, provide us with a world to experience and it is only that experienced world that we can control.
With all respect to you Fred,
Boris
P.S. I really hope that you’ll be the second “fierce defender of PCTâ€?… J
Fred Nickols
From: Boris Hartman [mailto:boris.hartman@masicom.net]
Sent: Monday, August 21, 2017 7:26 AM
To: csgnet@lists.illinois.edu
Subject: RE: Dealing with the limitation of only positive neural signals
Martin
From: Martin Taylor [mailto:mmt-csg@mmtaylor.net]
Sent: Sunday, August 20, 2017 5:21 AM
To: csgnet@lists.illinois.edu
Subject: Re: Dealing with the limitation of only positive neural signals
[Martin Taylor 2017.08.19.23.15]
On 2017/08/19 6:16 PM, Boris Hartman wrote:
Dear Eetu,
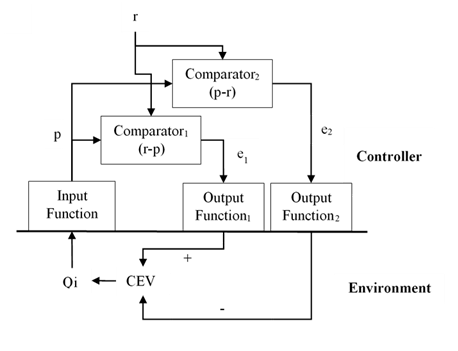
diagram is nice, but I’m afraid that it would be better if you would use standard Bills’ diagram. My oppinion is that general Bills’ diagram is about »comparator« that represent »one neuron« or all »nervous system«. So introducing new »comparator« into general picture and double »outputs« could mean that you introduce new »nervous system« and multiple and separated acting on environment. My oppinion is that »nervous system« does not operate in this way.
Boris, have you managed to find a way to discover neurons that output negative firing rates?
Without them, how does the structure in your diagram work? All Eetu’s diagram does is implement Bill’s diagram using neurons that have only positive firing rates.
HB : I don’t understand what you are talking about. Who was talking about positive and negative firing rates ? Neurons fire in quite exact way. First I’d like to see if you understand how ?
MT : There are probably lots of other ways to do it,
HB :
You mean other physiological ways to do it ? Or which other ways ? Can you show me some examples from Bll’s literature. It could be that I didin’t understand right what your diagram was about.
MT : …but Eetu’s diagram adds or subtracts nothing frrom or to Bill’s diagram, other than to suggest a way to make Bill’s structure work with physiologically feasible neurons.
HB : As I said maybe I missed something. So could you please show me physiological plausability of such diagram with one »input function« in organism (choose receptor) and affent neuron or in your case neurons, how this really works in organism ? I expect you also to show me how neurons in such a double diagram physiologically fires ? And of course how these neurons will connect to »output« ? If as you said everything work with physiologically feasible neurons.
Boris
Martin
I attached one of his diagrams where »branching of perceptual signal« is not divided on the same level to many comparators and many outputs. I think that this Bills’ diagram is more in accordance with physiological facts and it more fits into general »picture« how nervous system function. And I think it’s better to use his explanation in his books without using any Ricks’ imagination constructs and his literature which is by my oppinion useless for PCT explanations. I’d advise you using Bills’ literature and his explanations of PCT.
Boris
From: Eetu Pikkarainen [mailto:eetu.pikkarainen@oulu.fi]
Sent: Wednesday, August 16, 2017 9:21 AM
To: csgnet@lists.illinois.edu
Subject: VS: Dealing with the limitation of only positive neural signals
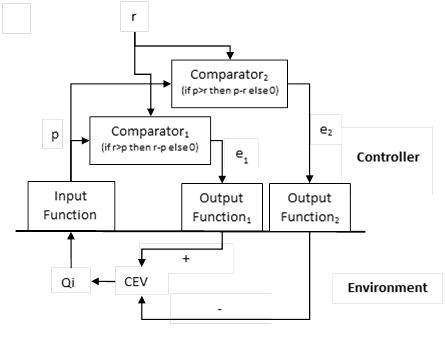
Martin,
did you men something like this:
![mailbox:///Users/mmt/Documents/Thunderbird_data/Mail/mmt-csg/Inbox?number=299398552&header=quotebody&part=1.1.2&filename=image001.png]()
Eetu
–
Please, regard all my statements as questions,
no matter how they are formulated.
-----Alkuperäinen viesti-----
Lähettäjä: Martin Taylor [mailto:mmt-csg@mmtaylor.net]
Lähetetty: 16. elokuutata 2017 8:13
Vastaanottaja: csgnet@lists.illinois.edu
Aihe: Re: Dealing with the limitation of only positive neural signals
[Martin Taylor 2017.08.16.01.06]
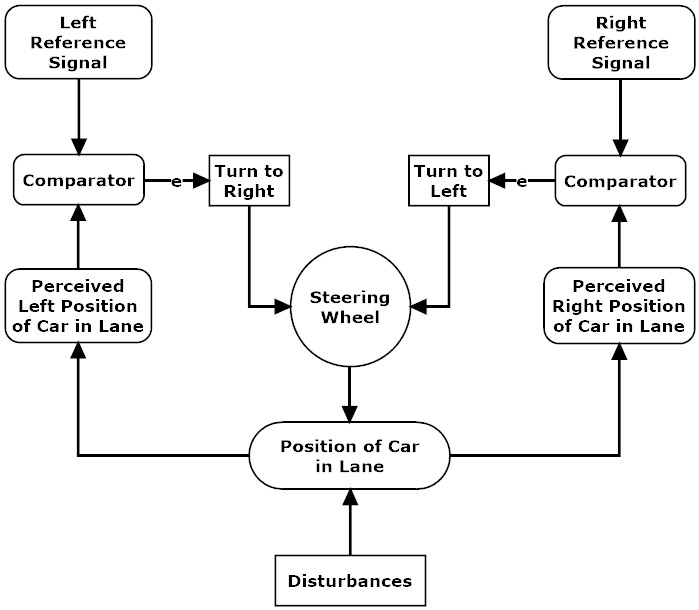
[From Fred Nickols (2017.08.15.1537 ET)]
Martin:
The attached .jpg diagram illustrates what I was talking about when I
referred to having different (yet connected) control systems for the
right and left positions of the car in its lane. That was my way of
getting around situations Rick raised where r might larger than p or p
might be larger than r, suggesting a negative or positive error yet
only positive neural signals are known to exist. Does it fit with the way you see it?
Not quite. I would have only one perceiving function and one reference value signal. Those signals would be sent to two comparators, one of which would have zero output if the error were rightward and the other would have zero output if the error were leftward. Otherwise, I think the rest of it more or less coincides with my view. The perceiver doesn’t have to have zero output for the car being in the middle of its lane, so you don’t need separate ones for left of centre and right of centre.
Martin