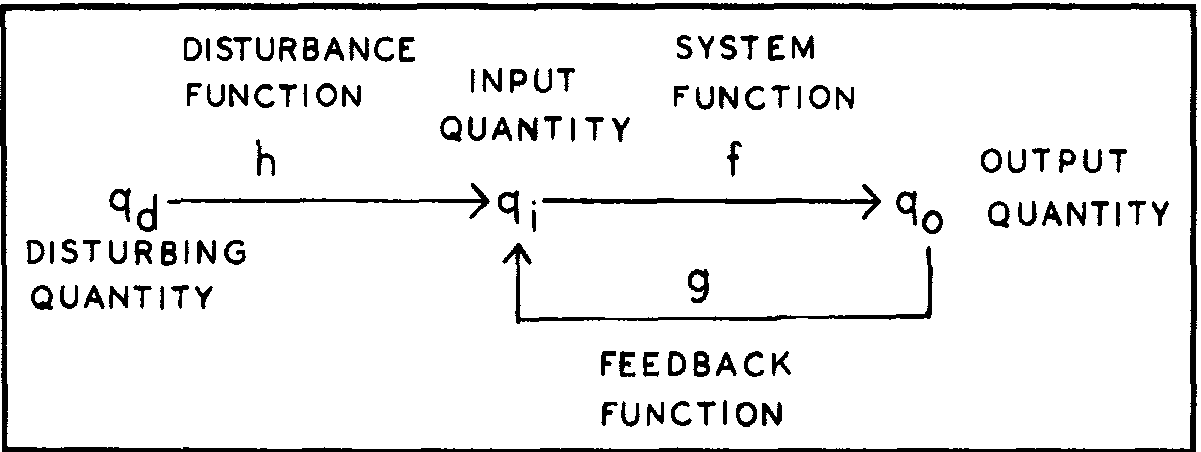
RM: The feedback function equation at the bottom of Figure 1.4a should be CV = k R rather than CV = k S. The feedback function is correctly described in the text
AM: It is not correct.
RM: It is correct with respect to the purpose of the book, which is to show why the study of living control systems should be aimed at determining the variables they control rather than at observing how stimuli (independent variables) relate to their responses (dependent variables).
RM: the illusion is taking the value of the coefficient relating the observed values of R and S to be a characteristic of the person when, in fact, it is a characteristic of the feedback function relating R to CV
AM: …that is the illusion, so it doesn’t make sense to me to put the wrong (illusory) organism function in the part of the diagram representing the organism in the control loop.
RM: It makes sense to me because that is the function that behavioral scientists think they are seeing in the observed relationship between S and R (independent and dependent variables)
AM: The correct organism function would be more clear in its place because the high gain of the organism function explains why the F would be equal to -S, and why the inversion of the feedback function happens.
RM: But it doesn’t explain why the illusion happens – why it appears that S is the cause of R via the organism. This illusion, which is the basis of scientific psychology (and neurophysiology and behavioral biology, etc), results from failure to see that the behavior of organisms is organized around the control of perceptual variables – CVs. The aim of the book is to encourage those who currently or are planning to study the behavior of living control systems to orient their research toward the discovery of the variables organisms control (and, of course, how they control them).
Best
Rick