I understand. Please take as much as time as it takes you to answer. Although I’m hoping that you wil come with »whole« answer. I’m also »caught in time«.
···
From: Bruce Abbott [mailto:bbabbott@frontier.com]
Sent: Friday, June 24, 2016 3:49 PM
To: csgnet@lists.illinois.edu
Subject: RE: FW: What’s perception got to do, got to do, with it?
[From Bruce Abbott (2016.06.0950 EDT)]
From: Boris Hartman [mailto:boris.hartman@masicom.net]
Sent: Friday, June 24, 2016 8:26 AM
To: csgnet@lists.illinois.edu
Subject: RE: FW: What’s perception got to do, got to do, with it?
Hi Bruce,
sorry for delayed respons. As I said I have my reasons.
I see we have some troubles coming toghether with our oppinions. But I’m sure we can make it. So I’ll start on the end as I don’t see other possibility to seek for our agreement. I hope you will not mind.
Hi Boris,
I’m truely sorry, but as I just stated in my last reply to Rick, I really have spent too much time on CSGnet given that I have gotten behind on some important committments. (I’m currently facing a deadline for revising my research methods book, for one.) I do intend to get back to you with a reply, but I’m afraid it will probably be at least another month before I can devote the time to a careful consideration of your post.
Best wishes,
Bruce
BA :
This is not to say that biological control system will have system diagrams that are identical to the simple proportional controller illustrated in the LiveBlock demo. To determine the actual nature of a given biological control system, we need anatomical and physiological evidence showing where relevant functions are carried out, the nature of the signals, and where the signals go. We are still quite a long way from being able to do that to any significant degree. Bill Powers suggested a possible Level 1 system that operates the skeletal muscles in 1973 and I am currently working on implementing a more recent model that Bill was developing, that incorporates more recent evidence.
HB :This is perfect beginning for possible agreements. This is the bases how can we explore how live organism function in contrast to machines or models or whatever we imagine as the “true� about “Real� organisms.
I agree with you that diagrams and models are not so far, so to simulate the exact working of biological Control systems. I agree with you that there is a long way to “determine the actual nature of a given biological control system, we need anatomical and physiological evidence showing where relevant functions are carried out�.
So if we start at the beggining of our »problem«. Disagreement about reference 0 (zero). My suggestion is that you try to use model »Live block diagram« in »real conditions« without using anatomical and physioloigical evidences. So we have to try to establish whether »Live diagram« could work as »real« organism or as you say »biological control system«.
BA : Do you have the LiveBlock demo? If so, try varying the reference level. I used zero in the example, but the system will generate a feedback that is nearly equal to the disturbance but of opposite sign no matter what reference value you use. Thus, this result is not, as you had claimed, a special case of using a zero reference value.
HB : It seems that you are all the time »working« only with model, and I’m observing from view of organisms functioning and how much »LiveBlock diagram« correspond to physiological facts. From the point of model or »diagram« reference value 0 (zero) is just one of the values, which represent just a change of value. But we mustn’t forget that it was designed by human, and that human can realize ideas in accordance with »facts«. So it can give to the model or machine any value, but the question is whether model or machine will correspond to »real world«
In real organism (physiological aspect) reference value 0 (zero) means that there is no signal. In nervous system signlas are produced by the Law of »ALL-OR- NON LAW«. In the case of reference 0 (zero) there is no signal (nothing happens). So this case is very different from the reference signals that are present. So the result reference 0 (zero) is as I have claimed very special case. Using reference signal 0 ( zero) means that organism is not producing reference signal. So as I have said before it can be indiicator that organism is not functioning any more. Most probably it can mean it is dead. How can organism which is not alive do any action ?
The »ALL-OR-NONE LAW« describes the relationship between »stimulus and respons«. All-or-nothing principle means all-or-none response (1 or 0). The magnitude of the action potential set up in any single nerve fiber is independent of the strength of the exciting stimulus. A bio-electrical stimulus below threshold strength fails to elicit a propagation of action potential.
Medical dictionary ( Physiology)
A rule applied to the activation of individual muscle or nerve cells, where the response to stimuli (depolarisation) only occurs above a certain threshold, usually –55 mV, after which a complete action potential occurs that is maximum in intensity—i.e., the strength of the nerve impulse is not dependent on, or a function of, the strength of the stimulus.
In short, nerv signal occurs or it don’t occur (depends from the trashold). In the case you presented as reference signal 0 (zero), nerv signal didn’t occur. You assumed that Contol loop in physiological sense is working without it. And that is impossible. How can organism work without reference that are produced in organism ?
So as I said before it’s very easy to »play« with diagrams, models and simulators, because values don’t represent the »real« process yet. But when we start applying »diagrams, models and so on« in »real circumstances«, plausibility with physiological facts are necesary.
HB : So the problem I see here is that you used PCT »Live Block demo« with basic assumption that it is perfect »match« to real organism. So that it shows exactly how organisms work. But we both know that »LiveBlock« diagram is not yet a perfect »match«. There is quite some things to be done. With machines there is no problem which value you use whether is 0 (zero) or any other value. But as I said before machine is designed by humans and values which are uused can be any value human choose. The only condition I know is, that values should work in »real« organism. And value reference 0 (zero) is not.
In the case of human nobody can’t design references. Only Nature can. So the main difference between human and machine or model is that human are born, they produce references and they die. Machines are not born, they don’t produce references and they don’t die. They can be damaged or they can stop working, they can be repared by humna or redisigned and so on. I hope I manage to present he main differences between human and machine and why they can’t be acquated.
So it seems to me, that relaying only on PCT »LiveBlock demo«, without checking whether anatomical and physiological »facts« are in accordance with BlockDiagram, you concluded that references at 0 (zero) are as good as any o6ther value. This is fundamnental mistake.
Many thinkers and Bill is included beleived and others still beleive that final arbiter for comparing models (machines) is nature.And you also beleive that this is true, otherwise I doubt that you would wrote the thoughts about plausability to anatomical and physioogical evidences.
So I beleive that, if you will try »Live block diagram« in »real« circumstances, simulating it’s working in »real« conditions, I’m sure that you will come to the same conclussions as I did. So if you’ll check reference 0 (zero) in real conditions, you will see that reference 0 (zero) in physiological sense means that there is no nerv signal . How can organism work without a reference signal ?
Reference signal is ordinary nerv signal and it »behaves« in accordance with general principles of nervous system.
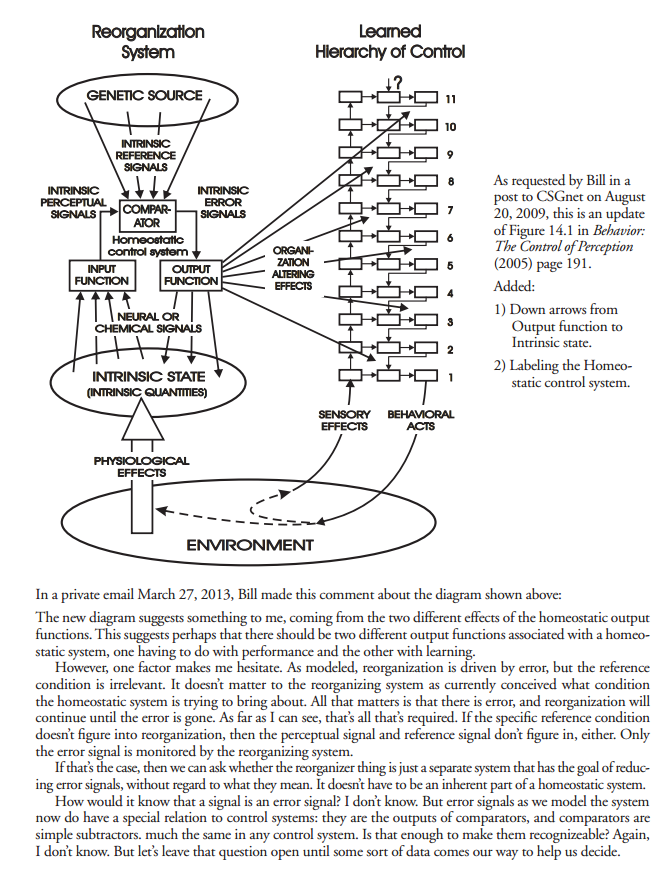
Bill didn’t suggested only »possible Level 1 system that operates the skeletal muscles in 1973â€?, but he suggested also the whole »PCT organism« on p. 191 (BCP, 2005). If you will look carefully you will see that lowest part of the hierarchy is »connected« to the external environment, so I’ll assume that it represents »Live block diagram«. So references for the »outer« control loop (Live blosk diagram«) are formed in hierarchy. The problem is the »question mark« on the top of the hierarchy, which put PCT in critical position. The most important feature of hierarchy of control loops is not defined yet. It’s not defined yet clearly how references are formed in organism and it’s not defined how it comes to 11th level to form »references« for all other levels. The PCT organism (p. 191) is not working properly yet, because it’s not clear how »references« are produced.
Dag’s diagram presents »new« picture (bellow) of »PCT organims« on p. 191. The problem of references is still present. I’ll not go into details how me and Bill came to this picture, which is presented by Dag (you can see discussion on CSGnet), but I’ll just say that I continued working on my own and I found my solution of architecture of Bill’s diagram on p. 191. I can say that I managed to »erase question mark« at the top of the hierarchy as I think that in my version of whole PCT organism on p. 191 is approximatelly working properly so it produces references as it should.
![cid:image001.png@01D119FD.595FDCD0]()
Bruce you are and you’ll be (at least for me) the best analyzer of »Live block diagram« (the same level as Martin). You have also some physiological knowledge and that is your advantage. So I think that you could make the same whole diagram of PCT organism on p. 191 (B:CP, 2005) working properly with using anatomical and physiological evidences. I’m sure you’ll come approximatelly to the same conclussions as I did. So when you’ll make the whole diagram I think that we shall find the way to final agreement about how PCT and real organism works.
There are and there will be »black spots« in our understanding of how Living beings really work or as you said : it is a long way to â€?determine the actual nature of a given biological control systemâ€?. But we have to try, don’t we.
Other answers in our conversation mostly come out directly from arguments I clarify above. So :
HB : Input is producing directly output. It seems like behavioristic approach.
BA : No, the output arises from the operation of a closed loop. The input is transformed by the input function to a perception; this is compared to the reference value at the comparator, which takes the difference between reference and perception to create the error signal. The error signal drives the output, which affects the input via the feedback function. This feedback acts to change the input in such a was as to reduce the error between the reference value and the perception.
HB : The output is the result of comparison between reference and perceptual signal. And it’s not neccessary that it is the result of »outer control loop«, which you probably had in mind. In any case. With reference 0 (zero) output can be produced only by input speaking of course in behavioristic sense.But in physiological sense this will not happen if organism is not producing references so it’s not alive.
BA : The beauty of control systems is that it doesn’t matter what they are composed of – human-made hardware or biologically evolvedd components (neurons, muscles, hormones, etc.) – they will functionn in the same way. The whole point of PCT is that human and animal behavior can be understood as the output of biological control systems. We can analyze the operation of such systems just as we do any human-designed control system.
HB : I gave arguments above why machines and organisms can’t be equated. You can also read again arguments from Henry Yin. Humans and machines will never work the same. There are some main principles that are making them alike, because machines are made by human. But mixing them as the same can cause a lot of troubles.
Thinking about the equality between machines and organisms brought you in the position where you already admitted that you made a mistake when you tried to equate control in outer environment by machines and control in Living beings (see our previous discussions).
Bruce I still think that we can come to possible agreement about real nature of PCT. My proposal is that you »finish« diagram on p. 191 (B:CP) and then we can continue our discussion. Fully operational diagram will also help Rick to »reorganize« confussion in his head and others who are repeatedly misleaded by Rick.
Best,
Boris
From: Bruce Abbott [mailto:bbabbott@frontier.com]
Sent: Tuesday, February 09, 2016 2:45 PM
To: csgnet@lists.illinois.edu
Subject: RE: FW: What’s perception got to do, got to do, with it?
[From Bruce Abbott (20160209.0845 EST)]
Hi Boris,
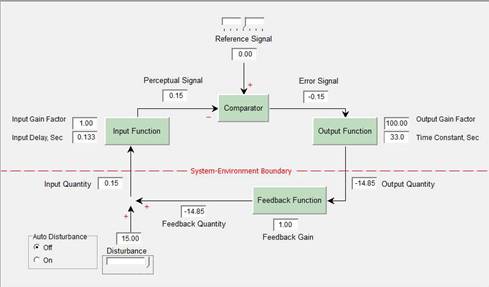
Below you make several claims about the screenshot I provided of the LiveBlock demo, as follows:
HB: About diagram you showed, I assume it’s possible support to your arguments, I think it’s not a good example. So I see a main problem that by my oppinion you choosed very rare case in natural functioning of organisms…. My critics for your choosen values in diagram from »endless« possible (as Ashby would say) are :
HB : It’s physiologicaly extreme example. Reference signal zero with outer »steady-state« is probably non existant as stable state in organism’s functioning or of very rare existance in organism as something »passing through«. I doubt that it could contribute to understanding how »generaly« organisms function. Reference zero can also mean that organism is not functioning any more. It’s not clear how efectors are »alive« if there is no »goal« in organism.
BA : Do you have the LiveBlock demo? If so, try varying the reference level. I used zero in the example, but the system will generate a feedback that is nearly equal to the disturbance but of opposite sign no matter what reference value you use. Thus, this result is not, as you had claimed, a special case of using a zero reference value.
HB : I still think that you used wrong example. The system if you mean »Liveblock« diagram will really generate something when references are ZERO, BUT ORGANISM WILL NOT. We have to make clear distinction between model and real organism, becaus emodel or LiveBlock diagrma has to fit to the »real organism« not vica verse. If diagrma is showing you something to be right it doesn’t mean that it is right also for »real organism«.
If you would match the »LiveBlock demo« with physiological evidences then you would notice that reference signal is simple neural signal. And for the neural signals in organism there is general rule in how they appear. It’s called »All or nothing«. So in organism neural signal appears or it not appear. It 1 or 0. Whether there is a signal or there isn’t. Whether the sum of incoming input signals exceed the axon trashhold or they don’t. So taking the reference as 0 it means that there is no referecne signal. That’s what in physiology means neural signal 0. There is no signal, so there is not neural activity. This is a big difference between macihne and »Live organism«. Organism produce neural signala and stay alive. If it don’t produce neural signals it’s most possible that it’s not alive any more. Machines are not born, they don’t produce reference signal and they don’t die. People can set any values for machines even 0, but in organism references are set by the nature. They can be set by other people.
-
Input is producing directly output. It seems like behavioristic approach.
No, the output arises from the operation of a closed loop. The input is transformed by the input function to a perception; this is compared to the reference value at the comparator, which takes the difference between reference and perception to create the error signal. The error signal drives the output, which affects the input via the feedback function. This feedback acts to change the input in such a was as to reduce the error between the reference value and the perception.
In the behavioristic (S-R or open-loop) approach, the input (stimulus) drives the output (response), but there is (a) no comparison between a reference level and perception, and (b) there is no effect of the output on the input (i.e., no feedback). Clearly the LiveBlock diagram is not a diagram of a stimulus-response system.
-
Almost at every possible value in the diagram you could make »endless« of such »a pictures« for different values with »outside steady-state«, but that doesn't mean that every »picture« will represent how organism function.
The LiveBlock demo correctly describes how a simple control system works, both statically and dynamically. You can have the demo produce a continuously varying disturbance value and observe that the system still acts to keep the perceptual signal close to the reference value.
The beauty of control systems is that it doesn’t matter what they are composed of – human-made hardware or biologically evolved components (neurons, muscles, hormones, etc.) – they will function in the same way. The whole point of PCT is that human and animal behavior can be understood as the output of biological control systems. We can analyze the operation of such systems just as we do any human-designed control system.
This is not to say that biological control system will have system diagrams that are identical to the simple proportional controller illustrated in the LiveBlock demo. To determine the actual nature of a given biological control system, we need anatomical and physiological evidence showing where relevant functions are carried out, the nature of the signals, and where the signals go. We are still quite a long way from being able to do that to any significant degree. Bill Powers suggested a possible Level 1 system that operates the skeletal muscles in 1973 and I am currently working on implementing a more recent model that Bill was developing, that incorporates more recent evidence.
Bruce
From: Boris Hartman [mailto:boris.hartman@masicom.net]
Sent: Tuesday, February 09, 2016 1:51 AM
To: csgnet@lists.illinois.edu
Subject: RE: FW: What’s perception got to do, got to do, with it?
[From Bruce Abbott (2015.12.20.1030 EST)]
From: Boris Hartman [mailto:boris.hartman@masicom.net]
Sent: Sunday, December 20, 2015 1:21 AM
To: csgnet@lists.illinois.edu
Subject: RE: FW: What’s perception got to do, got to do, with it?
Bruce,
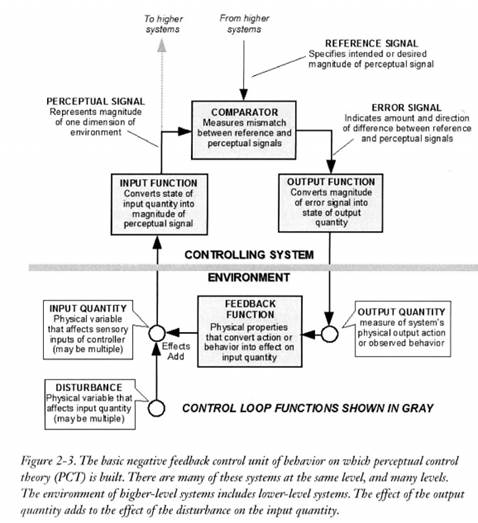
HB : My opinion is that there is no “subtractorâ€? (o-d) in environment in the “input quantity«. At least I never saw anywhere Bill using this combination. But “adderâ€? (o+d) as it’s seen from Bill’s diagram as “add effectsâ€?, is something what is common in Bill’s theory, so effects of output and disturbances are “addedâ€? in environment. It’s clear in his diagram.
BA : Boris, I agree with you: There is no »subtractor« in the environment. But I think you are getting confused between adding variables and adding the values of variables.
HB : I’m glad that we agree about »subtractor«. That’s »closing« our mutual understanding of PCT to a higher level. But I would wait with accusatons who is confused.
![LiveBlock Negative Feedback.jpg]()
About diagram you showed, I assume it’s possible support to your arguments, I think it’s not a good example. So I see a main problem that by my oppinion you choosed very rare case in natural functioning of organisms…. My critics for your choosen values in diagram from »endlless« possible (as Ashby would say) are :
-
It's physiologicaly extreme example. Reference signal zero with outer »steady-state« is probably non existant as stable state in organism's functioning or of very rare existance in organism as something »passing through«. I doubt that it could contribute to understanding how »generaly« organisms function. Reference zero can also mean that organism is not functioning any more. It's not clear how efectors are »alive« if there is no »goal« in organism.
-
Input is producing directly output. It seems like behavioristic approach.
-
Almost at every possible value in the diagram you could make »endless« of such »a pictures« for different values with »outside steady-state«, but that doesn't mean that every »picture« will represent how organism function.
Playing with »control loop« can be by my oppinion »dangerous« for understanidng how organisms work, if somebody is playing into extremes or if use other impossible values from organisms survival limits. »Live-block« diagram is just a model that can help to understand. it’s not almighty »tool« for representing how organism function in any case. So I think that members of CSGnet should be carefull about using »diagram« in any meaning.
I personaly think that it’s not clear yet in PCT how references in organism are formed, otherwise the »question mark« on 11th level would be removed. Nobody has done it yet and also in »new version« which was exposed by Dag, there are some changes made to »the whole diagaram«, but it’s stil not clear what »question mark« on 11th level means, and thus open the question how organism as »the whole works« and how references are formed.
So I think that PCT is in the »stalemate« position and in the situation that we don’t understand clearly how »PCT organism« function and what diagram with »the whole double feed-back control loop« on the bases of »reorganization« and »homeostatic« subsystem represent.
So my advice again is that CSGnet has to solve as soon as possible Dag’s »new diagram« where »confusion« with »reorganization« and »arrow to intrinsic variable« exists. I think in this way it will be finaly understood how »references« in organism are formed and »question mark« on the top of 11th level erased. My oppinion is that the »origin« of references can be understood only if the »whole« picture of PCT organism is understaood.
![cid:image001.png@01D119FD.595FDCD0]()
HB : And Bruce. I think that you could easily and with competence show how diagram (LCS III) realy works and how can be usefull in understanding how organism »really« function. By my oppinion effects are always added in »input quatity«. But that doesn’t mean there is any »subtraction« going on in outer environment or control. In PCT »subtracting« is done only in comparator inside organism, as that is aproximatelly one of the main principles how nervous system function.
I beleive that »input quantity« is something what comes from Ashby’s idea, who proposed that from endless variables in outer environment, human system receive only limited amount (depends from capabilites of receptor) and form »abstract system« in the brain, which is quite reduced »perceptual amount« in respect to »endless« amount of possible physical variables outside. In this way »picture of reality« is reduced, and finaly »constructed« into »abstract system« from »transformations« on receptors into nerv signals.
So I think that »input quantitty« represents the limited amount of physical variables in environment that finaly affect the «input function« as the sum of effects (disturbances + output) to »input function« no matter how values are distributed.
The question is whether we shall put here milion of pictures of possible states that diagram (LCS III) can offer or we can agree that effects in environment are always added as Bill’s diagram shows (LCS III). It’s quite imagined construct.
![cid:image016.png@01D113B4.04DDF0B0]()
If we agree upon issues I mentioned then maybe we could agree that all Bills »definitions« stay.
So can we agree about the nature of control in PCT :
-
Observed behavior is not control or controlled. Behavior (output) is control empty
-
Perceptual signal is controlled, but not from outside. It's controlled inside organism.
-
Organism is controlling, not environment…
/span>
If we agree with this points, we can maybe agree also with Bill’s »defitnitions« of control elements, that are represented in diagram (LCS III) in which there is no fixed »controled variable«, just added effects in the form of »input quantity«. »Controlled quantity« or »controlled variable« in outer environment is by my oppinion imagined construct of »person in control« and observer.
And I have one request Bruce.
If it’s possible, please don’t use words which are describing me or my state. I feel like you are trying to disqualify me or that you are trying to show that I’m »confused person«. I could also say that you were confused by putting »subtractor« into outer environment and »control« from outer environment into perceptual signal. But I didn’t. I tried to discuss with you as an equal communication partner as I think that this could lead to constructive and final answers. So I’d be pleased if you avoid personal conotations. I will also try not to J
I felt the same way in conversation with Bruce Nevin. The first whom I saw using methods of »conotating« and »patronizing« others on this forum was Rick. So if anybody ask why my relation with Rick is as it is, the answer is in our history. And I think that Fred described the right reason why. So to avoid conflicts, I’d suggest no conotations of our personality.
I’d be glad if you conisder my offer, otherwise I think that our conversation couldl end in conflict. I respect you and your oppinion, so there is no need for this.
HB : I think it’s better that we talk about different oppinions. So I’d rather see that you take me as an equal partner in conversation, with whom you can reach an agreement or maybe we can get even more knowledge, both of us. So we can learn from each other. Isn’t this more productive?
Best,
Boris
BA : The two plus signs entering qo in Bill’s diagram represent the addition of two variables. In a negative feedback system, the values of those two variables will have opposite signs, in the steady state.
HB : I suppose you meant »two plus signs entering qi«.
We already established in the case of »sunbathing« that what you are proposing is not always the case with behavioral effects to environment or it’s not general event in environment. But we are seeking for general model of organisms behavior, which will explain every behavior. I understand your abstracting as the case when behavior really »oppose« or »counteract« disturbances. But there are many cases when this is not so. So for example as in »sunbathing« the input quantity is »purely« contenting disturbances with no opposing effect of behavior (output). So no adding effects of output, just disturbances entering »input function«.
I think that »input quantity« resembles to Ashby’s idea that there are some »physical variables« from endless in the world arround us which are used for forming »abstract system« in our brains, some construction of limited perceptual transformations of »real world«. So not all »physical variables« are converted (transformed) in »input fucntion«, just those which can be possibly »transformed« in accordance to nature of »input function«. And these seems to be gathered in »input quantity«.
We perceive and control a little part of the » world«, but enough for more or less succesfull control of our »survival«. Sometimes lack of perceptions can cost as life.
I suppose this was described as »model of reality« in Bill’s discourse where he was »closing« to solipsism. So I think that »input quantity« forms any kind of »mixed« disturbances (I like this Kent’s term) that are content of »input function« and are later compared and selectivelly controlled in comparator.
BA : The variables are added, but because the values have opposite signs, adding them results in a value for qi equal to the difference between d and qo!
HB : This could be one of the cases… I feel this as trial of manipulation. There are cases when this is not so.
BA : As proof, examine the figure below, which is taken from a screen shot of LiveBlock:
![LiveBlock Negative Feedback.jpg]()
BA : I moved the Disturbance slider control to the extreme right to produce a steady disturbance value of 15.00. The LiveBlock control system responded by adjusting the Output Quantity to minus 14.85. The result of adding these two quantities to qi is shown in the box labeled »Input Quantity«: 0.15.
qi = 15.00 + (-14.85) = 15.00 – 14.85 = +0.15
HB : The »proof« is arranged to your wanted values. And I don’t see what this has to do with »Behavior is control« ? Do you want to tell me, that there is »subtractor« in outer environment ??? You said it above it’s not.
HB : For better understanding I think that you could do more, for example analyzing all other possible values of »ouput« and »disturbances« ? Maybe you can get some more general solution ?
Maybe you could arrange it so that »Output quantity« is zero ? What does this mean for control in organism ?
This will mean that »control« was moved to inside the organism (there is no »control quantity« outside).
HB : Maybe you could include also the case where LCS is »protected from disturbances« where it seems that Rick is insinuating that disturbances are zero and that they are not entering »input function« ?
I think that general control loop always ends in just »input quantity« which is transformed into perceptual signal and later in comparator where it si controlled. As Bill’s diagram in LCS III is suggesting.
So I think that in any case not only when »disturbances« represent the only »content« of »input quantity«, the perceptual signal is not »controlled«, but is going to be controlled.
Henry Yin :
A control system always controls its input, not output. Only perceivable consequences of behavior can be controlled.
HB :
So I think that control is happening in organism not outside. You can control what you perceive.
And this is what I think is many times neglected when speaking about »outer part of control loop«. Most important control happens in organism and that is what is not clear in PCT yet. And behavior is the result of this control
But maybe the problem that this is not clear, can be »formation« of reference signal which is still under »mark of interogation) on 11.level…
Do you have any clue, how »the whole picture« of internal control in organism look like. Control inside the PCT organism is still very misterious (see Dug’s diagram which original version is on p. 191, B:CP).
Boris
Bruce
No virus found in this message.
Checked by AVG - www.avg.com
Version: 2016.0.7357 / Virus Database: 4522/11588 - Release Date: 02/09/16
No virus found in this message.
Checked by AVG - www.avg.com
Version: 2016.0.7357 / Virus Database: 4522/11588 - Release Date: 02/09/16