···
[From Rupert Young 2012.11.06 23.30 UT]
Bill Powers (2012.11.05.1355 MST)
BT: If you figure out for yourself what is wrong, you will never
forget it.
If I figure it out and tell you, you will just memorize an action,
which
will probably be the wrong one next time.
RY: That makes sense, and I appreciate your guidance on this
matter; though you may be overestimating my ability to work it
out! Btw, are you aware of what is wrong, or are you just
suggesting approaches for investigation?
BT: To make sense of this system you must * understand how each
part of it
works* , not just enter equations and run the program. Put the
final
model together piece by piece and don’t move on to the next piece
until
you understand the previous pieces.
RY: I was trying to do something like that (the third and fourth
sheets of the spreadsheet had a control system using a constant
disturbance and a plot of ln values), but kept getting stuck.
However, I’ve had another go along the lines you suggested, using
the third sheet (ln int) in the attached.
If a = b = 3 then ratio = 1 and ln(ratio) = 0
If a = 3 and b = 9 then ratio = 3 and ln(ratio) = 1.099
If a = 3 and b = 27 then ratio = 9 and ln(ratio) = 2.197
If a = 3 and b = 81 then ratio = 27 and ln(ratio) = 3.296
I note that as the ratio increases by a multiple of 3 then the
ln(ratio) increases by 1.099, which is also ln(3).
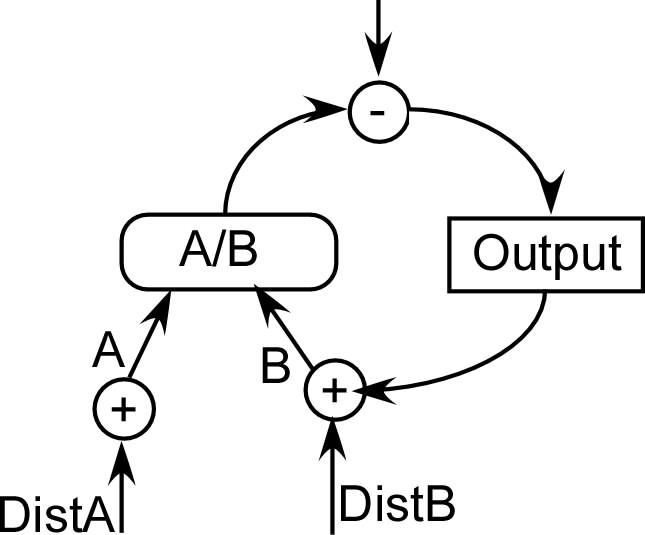
Closing the loop and using a pure integral and starting with a = b
= 3,
if reference is 0.1 the output slowly approaches the target of 30,
as the reference increases from 0.1 to 10 the output approaches
its target more quickly,
around 12 the output oscillates around the target,
13 and higher and the system becomes out of control
So here I run into an impasse again, as normally, with a
“standard” control system, increasing the reference would just
result in a longer time for the system to become under control
(wouldn’t it?).
Though row 4 (highlighted in sheet "ln int") doesn't look right.
The starting output is 0.714 and the target, that would bring the
ratio to the reference 13, is 0.23, with a gain of -0.5 one would
expect that g*e would represent half the amount between 0.714 and
0.23, but in this case it is 0.565, which means it overshoots. So
is it the case then that the error, and, therefore, the change
that we are applying to the output is not in the right units?
It's late, so I'll sleep on it; though any hints welcome.
Regards,
Rupert
On 05/11/2012 21:37, Bill Powers wrote:
[From Bill Powers (2012.11.05.1355 MST)]
Rupert Young 2012.11.05 19.00 UT
More on this later.
RY: I have used the
leaky
integrator, I think, o = o + s (g*e-o), what is the pure
integrator?
It's just o = o + g*e*dt.
There should be a dt in the leaky integrator version, too,
defining the
length of time represented by one iteration of the program.
However, using a sine
function
(see sheet LN Perc Sine) for “b” control doesn’t appear to
work. The values of the sine function are between 0 and 1. With
a ratio
reference of 0.001 the output should come to 1000. I have tried
changing
the values of slow and gain, but can’t get seem to get this to
work. Or
maybe control is successful but is lagging behind the sine
function.
Perhaps there is a flaw in using values between 0 and 1 for
“b”.
The trick here is to look at the behavior of each variable and see
if it
makes sense. First, set the two inputs to values with a ratio
somewhere
near 1 (say, between 0.1 and 10.0) and see what the perceptual
signal is.
Vary one of the inputs and see how the perceptual signal changes.
This
will show you the range of values of the perceptual signal. Set
the
reference signal somewhere within this range, and look at the
error
signal. Then close the loop and with the disturbing variable
constant,
see how the output changes the other input variable and whether
that
variable approaches the correct value. You can adjust dt to make
the
approach to the final values happen in a reasonable time – not
too fast,
not too slow. You may find at this stage that a gain is much too
large,
or much too small. You may find that a sign is wrong so the error
gets
larger instead of smaller as each dt goes by.
To make sense of this system you must * understand how each part
of it
works* , not just enter equations and run the program. Put the
final
model together piece by piece and don’t move on to the next piece
until
you understand the previous pieces. By “understand” I mean to
figure out what you should see, then check to see if that is what
happens. If the inputs are a = 10 and b = 20, then what should the
perceptual signal be? Is that what it is? Then subtract the
perception
from the reference and see what the error is. Then after one
iteration
check the error again and see if it’s changing the right way and
by a
reasonable amount. And so on.
The first time you do this it can get pretty tedious, but you will
quickly get better at it. You’ll soon be able to do most of it in
your
head without even running the program.
If you figure out for yourself what is wrong, you will never
forget it.
If I figure it out and tell you, you will just memorize an action,
which
will probably be the wrong one next time.
Best,
Bill P.