[From Bruce Nevin (2004.07.19 20:55 PDT)]
Rick Marken (2004.07.18.0930)–
I’m glad someone is reading [what I
write]
I know the feeling.
This all seems to
contradict the slogan that behavior is the control
of perception.
It’s hard to make it clear verbally. But, of course, the PCT
model
does control its own perceptions.
There’s a little problem here with ambiguous use of the word
“model”. Better to distinguish between model and simulation. I
don’t think you mean the PCT model. The theoretical model is about the
control of perceptions, theory doesn’t have perceptions or control them.
I think you mean any given PCT simulation. A PCT simulation does control
its own perceptions, that is, quantities identified in the simulation as
perceptual signals. It also controls the quantity called EV, which is
equally well specified in the simulation as the quantities for perceptual
signals. In this respect, a simulation is different from the situation
that it simulates. In the real situation, the perceptual signal is well
specified to the controller but not to the observer; EV is known to the
controller only as the perceptual signal, and is a variable distinct from
the controller’s perceptual signal only for the observer. But the
observer does not know EV directly, but rather as a perception. So that
which the simulation represents as a quantity in the environment is
actually knowable only as a perception in the observer and a perception
in the controller.
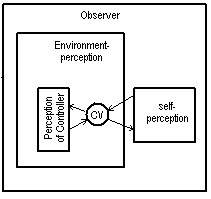
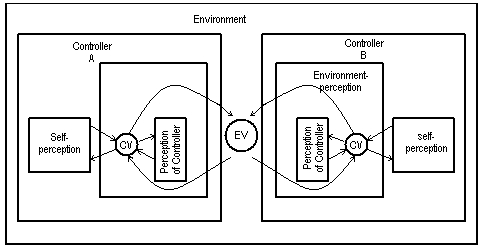
The main problem when talking about
this, I think, is the term “environmental variable” (EV), which
refers
to the observer’s perception of a variable that corresponds to the
“perceptual variable” that is being controlled by the
controller.
Yes, EV refers to the observer’s perception of what (in the judgement of
the observer) the controller is controlling. Therefore, EV is a fortiori
the observer’s perception of the controller’s perception. This is
possible without input from the controller’s perceptual signal to some
kind of other-people’s-perceptual-signal-detector just as it is possible
for you to have a perception that I am not (or am) an enemy of PCT, or
that I do (or do not) agree with you.
Like the perception controlled by the
controller, the EV is a function of
physical variables in the environment.
Hang on. That’s an assumption. A very well supported assumption, having
the weight of all the physical sciences behind it, not to mention the
glacial weight of millennia of evolution. But the fulcrum of this dilemma
is expressed in the slogan “it’s all perception,” we cannot
leap so lightly and glibly to a contrary assumption.
But from the observer’s point of view the EV
is “in the environment”.
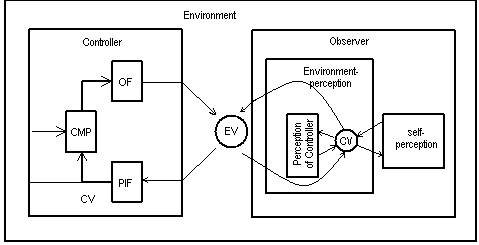
In a simulation, such as a simulation of the interaction of controller
and observer/tester, EV is in the environment as the
“physical variables” of which the perceptual signals of both
controller and observer are functions. The simulation pretends to direct
knowledge of the environment beyond the perceptual signals. In the
simulation it is perfectly clear that two systems in conflict are
controlling the same value EV at different reference values for the
corresponding perceptions. This is why I have been asking the question
“what exactly is the same?” again and again, to bring out this
unwarranted (thought well supported) assumption which flies in the face
of the slogan “it’s all perception”.
BTW, I wonder what conflict would look like in Bill’s multi-control demo.
If 100 controllers can control 100 unique perceptions, each perception
being a different function of a common set of environmental variables,
then it would seem that any two controllers would be in conflict over the
values at which they control the environmental variables while perceiving
different perceptions. If not, then the notion of the loop being closed
through the (unknowable) environment goes haywire.
Like the perception controlled by the
controller, the EV is a function of
physical variables in the environment. The EV is like the patterns
of
coins controlled in the coin game. The pattern is the perception
controlled by the controller and the EV (also a perception, of
course)
is what is perceived by the observer.
But what you go on to say here is that EV is no more than the observer’s
perception. EV is in the environment exactly to the extent that the
controller’s perception is in the environment. But the observer is
designing the simulation, so it is the observer’s perceptions that are
represented in the simulated environment.
Hence, the
controlled variable for catching a ball is described as a
change in the retinal image, not as the movement of the ball through
its trajectory overhead.
Right. The trajectory of the ball is a physical reality outside the
system.
The trajectory of the ball is another perception – one that both the
observer and the ball catcher might have, but if the ball-catcher has a
perception of ball trajectory, that is not the perception that he is
controlling. We assume that the trajectory is a physical reality, and the
assumption has all the weighty backing noted earlier, but in this context
where we know “it’s all perception” we cannot simply assert
that the assumption is so.
This trajectory is sensed by the system and
some function of
that sensed variable is what is perceived and
controlled.
We assume that something is really going on. Whatever is really going on
is sensed. The trajectory is one function of sensed variables.
Acceleration in the retinal image is another function of sensed
variables.
The EV is a perception in the brain of the
observer.
Oops! Now we are back again to the assertion that two systems in conflict
are controlling the same variable. See above, where I said
In a simulation, such as a simulation of the
interaction of controller and observer/tester, EV is in the
environment as the “physical variables” of which the perceptual
signals of both controller and observer are functions. The simulation
pretends to direct knowledge of the environment beyond the perceptual
signals. In the simulation it is perfectly clear that two systems in
conflict are controlling the same value EV at different reference values
for the corresponding perceptions. This is why I have been asking the
question “what exactly is the same?” again and again, to bring
out this unwarranted (thought well supported) assumption which flies in
the face of the slogan “it’s all perception”.
A simulation asserts something about the environment that we cannot know.
The observer, however, asserts something about the perceptions of the
observed controller. The Observer asserts
CV(observer)
= CV(controller)
Or, if we accept that EV = CV(observer), the Observer asserts
EV =
CV(controller)
The simulation, however, puts EV in the environment and not inside the
observer as a perception. The simulation therefore asserts something that
the observer cannot know
CV(observer)
= EV = CV(controller)
a controlled variable is … an aspect of
one’s own perceptions that
corresponds to the perception that the organism is controlling.
This sounds very much like what we commonly
call empathy.
Yes. I think that I, myself, have described The Test as
"systematic
empathy".
And this is what I meant when I said that the observer has a perception
of the observed controller’s perception. By interaction with other
controllers, the observer develops perceptions about the environment,
about what other controllers are perceiving, and about how other
controllers are controlling those perceptions.
An aunt of mine, one of my mother’s sisters, was always teasing and
provoking conflict among others. I asked her why. She said she found
things out that way. I think this is pretty common.
A guess or
hypothesis as to the controller’s perception is a
perception of the controller’s perception.
I think that’s a rather confusing way to say it. You are not
perceiving the controller’s perception. You are perceiving a
variable
(like the pattern of coins) that appears to be in the environment of
the controller, noticing that it is protected from disturbances and
imagining that what you are perceiving is what the controller is
perceiving (and controlling). Saying that you are perceiving the
controller’s perceptions, I think, gives an impression of certainty
about what another agent is experiencing that is quite
unwarranted.
I agree that it is confusing. Careful adherence to principles of PCT does
result in awkward language sometimes. The principle I am trying to adhere
to is expressed in the slogan “it’s all perception.” A theory
is a perception. An imagined perception is a perception. However, if it
is imagined I am not clear how the “imagination connection”
works with this sort of perception. This is not an existing perception
whose inputs at some level or levels in the hierarchy are copies of
stored reference signals. The inputs are from the environment, and the
perception itself could be novel.
Surely there can be
no doubt that we harbor perceptions of what others
are perceiving. You do it yourself, e.g.
Actually, I have never perceived what another person is perceiving.
I’m
pretty confident that I experience the world as others experience
it.
So I imagine that I perceive as others perceive. In your words, I
harbor “imaginings” of what others are perceiving. But I have
never
harbored perceptions of what others are perceiving. What I have
done,
using the Test as well as informal questioning methods, is an
approximation to “mind reading”, which involves finding aspects
of _my
own perceptions_ that correspond to those perceptions that are
experienced and, perhaps, controlled by others. What you seem to be
talking about is Heinlein’s grokking,
Not at all. I am simply saying that it’s all perception. What you call
“imagining” is not exempt.
I am imagining that you see merit in Bill
Williams’ comments, for
example. But I don’t perceive your perception of those
comments.
The syllogism goes this way: Your imagining is a perception. It is an
imagining of my perception. Therefore it is a perception of my
perception. It sounds like you deny the major premise, that your
imagining is a perception. If it is not a perception, what is it? EV is
the controller’s perception. It is not the controller’s imagining which
is somehow something other than a perception.
Once we acknowledge
the phenomenon
You mean the phenomenon you describe as perceiving others
perceptions?
I think this “phenomenon” is just a poor way of describing
what I
describe in the “Dancer and the Dance” paragraph that you quote
above:
What we perceive about another’s perceptions when we do the Test are
aspects of our own perceptions that we imagine, with some
confidence,
to correspond to perceptions that the controller is
controlling.
Sure.
, I think maybe you
can see that it requires no change to PCT to
account for it.
I agree. Because it is a phenomenon already explained by
PCT.
Good. Then you agree that “theory of mind” phenomena underlying
culture are not challenging in the sense of requiring fundamental change
to the theory.
Modeling such
things will be difficult because these are difficult
things to quantify
Modeling such things is what we do all the time when we build models
of
behavior. We are putting into those models aspects of our own
perceptions that correspond to what we imagine to be the perceptions
the organism is controlling.
But we are not modelling two or more systems, each of which controls
perceptions – imaginings if you insist, or theories, or informed
guesses, but these are all perceptions – of what the other is
controlling.
Now I wonder if you
would be willing to go over some of your java code
with me in Chicago? There are no comments in it, and I would like to
understand it. The mind reading demo, perhaps?
Of course. I’ll be very happy to go over them with you. If you know
java perhaps you could help me improve the user interface and
upgrade
some of the code, which is now considered deprecated (though it
still
compiles and runs).
I don’t, but Ive done some programming and I’m willing to learn. I
brought a starter book with me and might even get some time to work
through some of it.
I’m in CA now for some training; my email contact is sporadic and
somewhat unpredictable.
/Bruce
···
At 09:42 AM 7/18/2004 -0700, Rick Marken wrote: