This is a wonderful response. I have spent part of the weekend studying Martin’s Layered Protocol Theory papers that he recently made available. I was curious about his response to my question and wanted to understand what he might be trying to say. He obviously knows the difference, and I can’t imagine that he would apply this theory to interaction with a table or chair or even a rock. The whole process of encoding and decoding is not something that natural objects or even machines engage in, to the best of my knowledge. If I want to sit in a chair, I simply pull it out and sit on it. I do not “interrupt” it’s on-going process of control. However, if you are already sitting at the table, I might be interrupting your process of control. On the other hand, I might be facilitating your process of control if you were waiting for me to arrive. Â
Just wanted to appreciate your response and while I might be slow I am still processing my sense of Martin’s Prime Message.
···
On Mon, Nov 28, 2016 at 6:08 PM, McClelland, Kent MCCLEL@grinnell.edu wrote:
From Kent McClelland (2016.11.28.1400)
On Nov 27, 2016, at 11:51 PM, Richard Marken rsmarken@gmail.com wrote:
Rick Marken (2016.11.27.2150)
Rick’s latest argument in this long-running thread debating the nature of reality from the PCT perspective is that the objects around us in our everyday lives that we perceive as real, like tables and chairs, "exist only as perceptions
that are assumed, in PCT, to be functions of the variables in the physical model,� or in other words the model of the world provided by physics. His arguments in this debate,
and those of Rupert Young, have all been framed in terms of what happens when isolated individuals interact with an unknown physical reality, which is only describable in terms of physics.
To me, as a sociologist, this framing of the argument has seemed short-sighted, and I’ve had the feeling that this whole discussion about
reality might benefit from a little reality check. Another sociologist, Bob Hintz, in his  post
a few days ago (11-25-16) raised a crucial point that has this thread has so far neglected:Â
BH: How does a conception of that world out there change if it is composed of  mothers, children, pets, and mosquitoes. A model of that world is not supplied by physical sciences. The interaction between independent control
systems is different from the interaction between a biological control system and the physical objects that might be outside the boundaries of one’s skin.Â
Martin
Taylor (2016.11.25.16.53) dismissed Bob’s question by arguing that control of perceptions works the same way whether a person
is interacting  with other independent control systems or only with inanimate objects. While Martin’s argument is probably correct, his answer still misses
the essential point: that the presence of other control systems acting upon the environment encountered by an individual has an enormous impact on the stability of certain aspects of that environment, and thus upon the “reality� of the environment as perceived
and experienced. The reality of our everyday living environments is a socially constructed reality, not the reality described by physics.Â
This reality in which we conduct our lives is a common-sense world, and I mean that quite literally. It’s a world that humans share in common  because
of their shared sensory apparatus, their typical modes of perception. This social reality is a world of "tables, chairs, lamps, computers, walls, windows, etc.,� (Rick Marken 2016.11.24.2140) all
manufactured and maintained by human control efforts, as well as a world of familiar patterns of social behavior, as the humans around us act
in (mostly) expected ways. It’s also world of shifting visual patterns on the electronic screens that most of us stare at for hours every day.Â
The physical environments in which  find
ourselves have come to us at birth already highly structured by the control actions of other people. Of
course, in our daily efforts to control our perceptions we ourselves constantly engage in manipulation of aspects of the physical environment that correspond to the perceptions we’re trying to control, but the
forms predominantly taken by those environments are not our own doing. To a very large extent our environments have been structured by others, including the people around us, animals, plants, and other people across the globe, some still alive and some dead.Â
The presence of other living control systems in our environments has given them a solidity, a stability, a reliability much different from the random fluctuations of the
nonliving physical world, because collective control, as I’ve often emphasized in my publications on PCT, has a far more powerful stabilizing effect on our shared environment than any individual can accomplish on his or her own.Â
Tables and chairs became common features of our common-sense environments because of the collective control efforts of generations of our predecessors, who first recognized the need for tables
and chairs, then built the first examples, named them,  refined and standardized the designs, and organized manufacturing and distribution systems for these artifacts,
which are now almost universally used. There isn’t a person in the developed or developing world (probably 99 of humanity) who doesn’t know about tables and chairs, and there are precious few populated places you could go where you wouldn’t find tables and
chairs.Â
People growing up in this kind of a world furnished with plentiful examples of tables and chairs will develop perceptual control systems through reorganization for recognizing and
using tables and chairs and all the other culturally stereotyped objects and patterns of action around them. Thus, the socially stabilized perceptual world comes to be built into our perceptions, as the reality of our redundantly standardized living environments
is internalized within us.
Of course, our perception of this standardized, manufactured world has a lot of limitations.  It’s obvious that the human sensory apparatus is severely
limited in a great variety of ways, including scale, scope, and quality. We can’t perceive things that are too big or too small, that occur too quickly or too slowly, that are too far away from our physical bodies, or anything getting news
of which might depend on signals from parts of the electro-magnetic or sound spectrums that are outside the ranges that we monitor. The edited version of reality available through our senses provides
only a small percentage of what we might perceive if our evolutionary heritage were different.Â
But our edited version of reality is based on the bedrock of a socially imposed stability in our living environments, and t his everyday reality is emphatically not "the
real world of the physical sciences,� as Rick would have it. Physics, after all, is just an abstract  model, a collection of high-level perceptions, a collection
to which most people have extremely limited access. Even scientists must usually rely on instruments and computers that spit out abstract images, graphs, or numbers, in order for them to control the
even more abstract perceptions that constitute scientific theory.
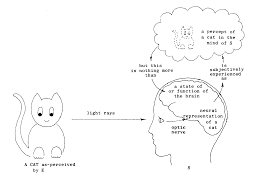
In his most recent post (copied below), Rick presents a diagram of a person perceiving a kitty to illustrate the conventional, non-PCT view of perception and then explains what’s wrong with that view: Â
What Rick has missed is that there actually are lots of things in that real world capable of perceiving kitties—all the other people thatt populate the environment that he shares with the kitty. Those people’s perceptions and ways of thinking and
talking about kitties have had an enormous, perhaps even determining influence on how Rick perceives the kitty. His perceptions, even though he imagines himself to be as isolated individual suspended in an inchoate world of numerical variables, are in no way
independent of theirs.Â
Until PCT theorists can expand their theories sufficiently come to grips with the everyday realities of the social environments in which we live, we’ll be stuck in fruitless discussions of the how-many-angels-can-dance
variety, discussions that have about zero interest for anyone outside the PCT fraternity. Just resorting to the slogan that “it’s all perception� means dismissing as unreal everything outside the skin of the isolated individual, even though the socially constructed
stabilities of our living environments have in fact been built into our perceptions.Â
We need to move beyond referring to everything in the physical and social environment—our everyday realityâ—simply as  undifferentiated “feedback functions.â€? The coining of the terms “CEVâ€? and “atenfelâ€? have represented
in my view a couple of useful steps in the direction of understanding this environment more clearly, and Martin’s work on “language and culture as malleable artifacts� for LCS IV contains many more examples of exciting new ways to think how PCT can apply to
the social reality around us.Â
PCT has provided us with an excellent framework for building a science of human behavior and interaction, but the edifice left by Bill Powers was unfinished. A complex scientific theory can never be the work
of one person alone. To be more broadly useful, the theory will require the collective control of lots of individuals working together, adding to it, revising it, filling in the details. It seems to me that we should get to work on understanding the reality
around us through the lens of PCT, rather than wasting time on esoteric ontological debates.Â
Best to all,
Kent
RM: The problem with this point of view is that it conflicts with the physical model of reality that is based on science. That model contains no kitties; just light waves, masses, forces and such. So a better way to draw this cartoon would be
to have an array of numbers instead of a kitty out in the real world; these numbers represent the intensity of the light rays entering the persons visual field. Based on the effect of those light rays on the sensory receptors the person’s perceptual functions
construct the perception of a kitty. There is no such perception in the real world outside the perceiving system. There may be a kitty out there but there is nothing in that real world that can perceive it as such.
[From Rick Marken (2016.11.27.2150)]
Martin Taylor (2016.11.26.10.06
MT: Â Nobody, not even Rick with his privileged access to the truth, can know whether tables and chairs actually exist as we seem to perceive them, but until control fails because we have perceived something to exist that does
not, we can’t know it does not exist.
 RM: It is true that no one, not even I, has privileged access to what is actually out there in reality. As I have said before, however, PCT (and I) take the truth of what is out there to be the current physical model of what is out there. There are no tables and chairs in that model. Tables and chairs exist only as perceptions that are assumed, in PCT, to be functions of the variables in the physical model. Also, it’s important to remember that, according to PCT, our
perceptual experience is made up of many levels of perceptual functions of the same hypothetical physical variables; and these perceptions are
variables . So a “table” is the state of a perceptual variable (the perception of a type of furniture, perhaps) that is itself made up of the states of perceptual variables like color, shape, relationship, etc. So there are no tables and chairs
out there to be perceived; there are just physical variables out there that can be perceived as tables and chairs.Â
MT: As RM says, even the physical variables are presumed to make up that real world, but we have to remember that this presumption is entirely based on the presumption that the objects themselves are real.
RM: Actually, PCT presumes that physical variables make up the real world based on the remarkable success of the physical models of which these physical variables are a component. The success of the physical models is demonstrated by their ability
to precisely predict what we will perceive when we manipulate other perceptions, like the inclination of a plane down which you roll a ball; that is, it’s based on science. It’s not based on the presumption that “the objects themselves are real” because “objects”
are perceptions themselves which are functions of the presumed physical variables that make up the reality described by the physical model. So in PCT we presume that perceptions, like the perceptions of tables and chairs, are
functions of physical variables, they don’t correspond to physical variables themselves*.* Â In PCT we don’t think of tables and chairs as really being out there (although we certainly assume it in our everyday lives); what is out
there (we presume, when we are wearing our PCT hats) are physical variables that are perceived as tables and chairs.
Â
MT: It’s a circular argument to say that tables and chairs don’t exist because they are configurations of physical variables whose presumed existence depends on the presumed existence of table and chairs.
RM: Yes, that would be a circular argument, indeed. The PCT “argument” is that tables and chairs exist only as perceptions in systems (like people) that are capable of constructing those perceptions; those perceptions are
functions of physical variables that are presumed to exist in an environment external to the perceiving system. I know this is a difficult concept to get but maybe the “What is size” demo can help. In that demo the relevant physical variables
are the intensities of the light waves emitted from different locations on the display. There is no “area” or “perimeter” or “diagonal angle” or “squareness” or any of the other variable aspects of the display that we can perceive; all there is “out there”
are, presumably, light waves varying in intensity over space. But these physical variables can be the basis for perceptions of  “area” or “perimeter” or “diagonal angle” or “squareness”, etc by a system that can compute these functions of the physical variables.
The physical variables that are the basis of these perceptions are presumed to be really out there; but the perceptions that are a function of these variables are not out there.
Â
MT: Control works if when you perceive yourself putting a chair under a table there really is a chair, a table, and a relation “under” in the real world.
RM: PCT would say that control will only work if, when you perceive yourself putting a chair under a table, there really are physical variables in the real world that are the basis for perceiving a chair and table and the chair perception being
moved under the table. This can’t be done, for example, if the basis of the perception of a table and chair are light waves reflected off a van Gogh canvas; in that case you can perceive the table and chair but you can’t put the latter under the former, without
destroying the painting, that is.
Â
MT: There is an infinite number of other possibilities, but Occam’s razor offers a single most probable possibility, which is that the reality by which we live or die actually contains those objects and relationships.
RM: Again, it would be more correct (from a PCT perspective) to say that the most probable possibility is that the reality in which we live contains the physical variables that are the basis for perceiving and controlling object and relationship
perceptual variables. I know this is a hard thing to understand; our natural inclination is to think of perception as corresponding to a reality that “looks like” those very same perceptions. Most people seem to think of perception as it is depicted in this
cartoon:
RM: The idea is that there are things – objects – like kitties, out there in the real world that correspond to our perception of those things. I call this the “through a glass darkly” view of perception because the main question, for people
who adopt this view – and it is the easiest view to adopt, as one can tell from its biblical origins – is how well perception represents what is “really” (or thought to be “really”) out there. The problem with this point of view is that it conflicts with
the physical model of reality that is based on science. That model contains no kitties; just light waves, masses, forces and such. So a better way to draw this cartoon would be to have an array of numbers instead of a kitty out in the real world; these numbers
represent the intensity of the light rays entering the persons visual field. Based on the effect of those light rays on the sensory receptors the person’s perceptual functions construct the perception of a kitty. There is no such perception in the real world
outside the perceiving system. There may be a kitty out there but there is nothing in that real world that can perceive it as such. That’s why the cartoon above is misleading. It’s putting out in the environment a perception of the kitty, not what is actually
in the environment, which is the physical basis for that perception.Â
MT: I ask once again, as I would also ask Rick: How, without using your perceptual apparatus, do you KNOW what is or is not in the real world?
RM: What we know of the real world is based on science and that knowledge exists in the form of a model – a tentatively correct theory of what is actually out there.
Â
MT: The CEV is a component of a theory that proposes that there exists one real world. In that theory, the CEV IS in the environment.
RY: But above you said it is “defined by the perceptual function”, so how can it be in the environment?
MT: I don’t know how else to say it than the various different ways I have used. Maybe I still don’t understand what your difficulty is.
RM: Here’s the difficulty. If the CEV is defined by the perceptual functiont, then it cannot be
in the environment. Here’s why. Let the environment consist of 2 independent variables, x.1 and x.2. Define a perceptual function, f(x.1,x.2), as the product of x.1 and x.2. So  f(x.1,x.2) = x.1x.2. So x.1x.2 is a perceptual variable that
and assume it can be controlled. So the function x.1x.2 defines a controlled perceptual variable. The CEV is supposed to be the environmental correlate of the controlled perceptual variable. So the CEV is the environmental correlate of the perception defined
by x.1x.2. But the only variables in the environment are x.1 and x.2 and they are independent – they have no effect on one another. That is, the environment itself cannot compute x.1x.2. So the variable x.1x.2 exists only as a perception. There is no environmental
correlate of x.1*x.2; that is, there is no CEV.Â
Â
MT: No. I mean No. Your influence is on something in the environment that I call the CEV and Rick wrongly calls the “controlled quantity”.
RM: No, your influence in the TCV is on the controlled quantity – the controlled perceptual variable as perceived by you. There is no such thing as a CEV in PCT, as I demonstrated above.
Best regards
RickÂ
–
Richard S. MarkenÂ
“The childhood of the human race is far from over. We have a long way to go before most people will understand that what they do for others is just as important to their well-being as what they do for themselves.” – William T. Powers