I’m sorry Earling to jump in but as I see it, you tryed to explain Rick in very gentle way that he should start using »Control of perception« not »Control of behavior«.
···
From: Richard Marken [mailto:rsmarken@gmail.com]
Sent: Wednesday, November 23, 2016 8:21 PM
To: csgnet@lists.illinois.edu
Subject: Re: TCV and Collective Control …
[From Rick Marken (2016.11.23.1120)]
Erling Jorgensen (2016.11.23 1030 EST)–
[EJ] In following this exchange, I am reminded of a passage from Powers’ B:CP that was very formative for me in turning from a realist to a constructivist epistemology. I don’t have my copy of B:CP with me right now, so I’ll have to reconstruct this from memory.
I think it was in the section where he talked about Relationships, giving examples of perceived relationships that are controlled. Then Powers said something like, “We could ask which relationships are really there in the environment, but that is a trivial question. All relationships are really there, even ones that are meaningless.” This is definitely my paraphrase of his point!
RM: This is a great point, Erling, and one I’ve tried to make in a couple of my demos. The point is that the same environmental variables can be perceived in many different ways. It’s the perceptual functions that determine how we experience the environment, not the environment itself. There is nothing in the environment that necessarily corresponds to what we perceive; but what is out in the environment is the basis for what we perceive.
HB : This was really a good start but the end is awfull……
RM: For example, in my “Control of Perception” demo (http://www.mindreadings.com/ControlDemo/ControlOfPerception.html) the same environmental variables – the display on the screen – can be perceived in at least three different ways – shape, size (area) and angle. And each of these perceptual variables can be controlled. But none of them are in the environment! Only the possibility of these perceptions is out there. And each possibility is made a “reality” when you perceive things that way using your perceptual functions.
RM: When I say that only the possibility of a shape, size or angle perception is out there I mean that all that’s out there (presumably) is electromagnetic energy of different frequencies, phases and intensities distributed over the space of the display. Call these spatially distributed environmental variables x.i. The perceptions of shape, size and angle are then functions of the sensory effects of these variables: so shape = f1(s(x.1), s(x.2)…s(x.n)), size = f2(s(x.1), s(x.2)…s(x.n)), and angle = f3(s(x.1), s(x.2)…s(x.n)), where the s()'s are the sensory effects of the environmental variables and the f()'s are perceptual functions of those sensory effects – the functions that produce what we experience as the shape, size or angle of the displayed variables.
RM: Hopefully, this shows what I think is the problem with the concept of a CEV. The idea of a CEV implies that there is some variable in the environment that corresponds to the perception that is controlled. But there is no variable in the environment that corresponds to, say, shape, size or angle. Size (area) is a function of environmental variables: say size = x.1*x.2. The variables x.1 and x.2 are, indeed, variables in the environment but size – the product of x.1 and x.2 – is not. The perception of size exists only because there is a perceptual function that can compute it.
RM: The fact that size is not in the environment – but the environmental variables that are the basis of size, are – can, perhaps, be seen more clearly in the fact that the same environmental variables are also the basis of shape and angle. Shape, for example, might be defined as x.1/x.2 so you are perceiving a square when x.1/x.2 = 1. But the square is not an environmental variable any more than size was. The concept of a CEV suggests that x.1 and x.2 can’t be both a size and a shape in the environment at the same time. But actually all that x.1 and x.2 can be is x.1 and x.2; size and shape exist only as perceptions, not as environmental variables.
RM; So I prefer to stick with the term “controlled quantity”, q.o, to refer to the perception of the controlled perceptual variable, p, from the point of view of an observer.
HB : What you prefer is irrelevant. There is no such thing in PCT as »Controlled perceptual variable« p. It’s simply »perceptual signal« that will be »controled variable« in comparator. See Bills’ diagram LCS III. There is also no »Controlled quantity« in diagram, because there is no »controlled aspect of environment« iether and of course there can’t be any »Controlled Perceptual variable«.
RM : It makes it clear that the controlled perceptual variable and the controlled quantity are both perceptions,
HB : It makes clear in your imgination and nowhere else. What a construct »Perception of the Controlled Perceptual Variable«. What it is for you »Controlled quantity« as perception which is not in the LCS III diagram and what it is »controlled perceptual variable« as perception ?
Bill P (B:CP) :
-
….it is even more apparent that a first-order perceptual signal reeflects only what happens at the sensory ending : the source of stimulation is completely undefined and unsensed….The perceptual signal from a touch receptor does not reflect whether the cause is an electrical current, a touch, or a chemical poisoning, or whether a touch occurs to the left or right of the exact receptor location.
-
There is no information in any one first order visual signal to indicate the origin of the light the input function absorbs : the source can be fluorescence inside the eyeball or an exploding star hundred million years removed in space and time, with no change in the character of the perceptual signal.
HB : Rick. How can something that has no identified source of stimulation be »Controlled Perceptual Variable« ??? Your ignorancy in PCT is so high that you are making serious damage to Bill and his daughters. And of course to PCT.
RM : ….but one (thhe controlled perception or controlled variable) is the perception in the head of the person doing the controlling and the other (controlled quantity) is the same perception in the head of the person observing, studying or trying to understand the controller.
HB : So I was right. Everything is your imagination. And you could stop bugging CSGnet forum with your fantasy and start promoting PCT with Bills’ diagram, his defintion and his terms. There is no »Controlled perception« there is just perception – controlled variable, that will be controlled in comparator. Fullstop.
Bill P :Â If system is to stabilize some quantity it must sense that quantity and it must have an internal standard against which to compare the outcome of that sensing process – a reeference with respect to which the sensed quantity can be judged as too little, just right, or too much. The action of the system is based on that judgement, not on the sensed quantity itself nor on the reference itself nor on the disturbances.
Bill P :
Using the internal point of view, we can understand many aspects of behavior by seeing control as control of perception rather than of an objective world. We can make sense not only of other people’s behavior, but of our own, using the same concept of perceptual control.
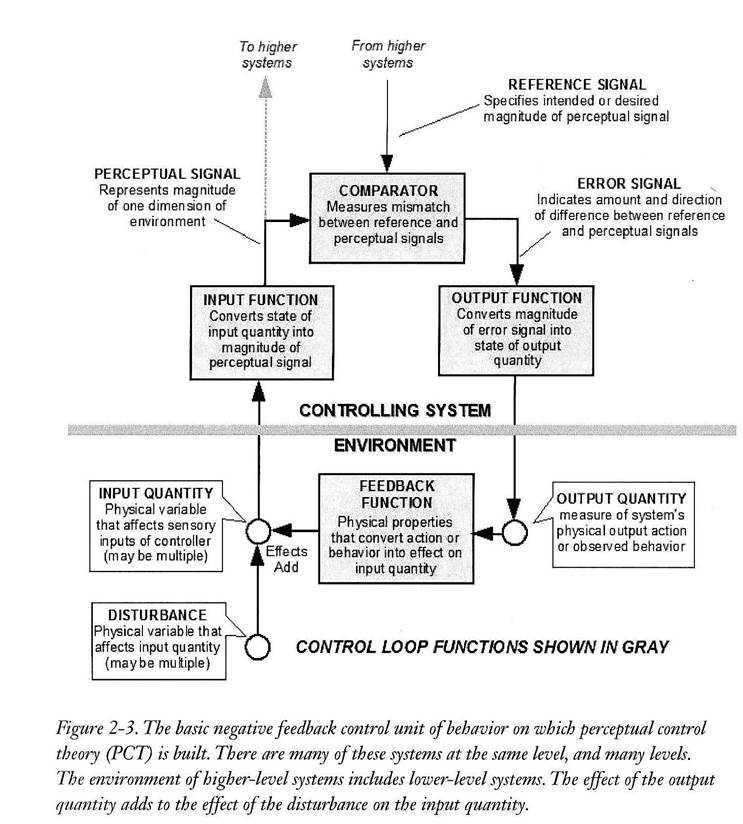
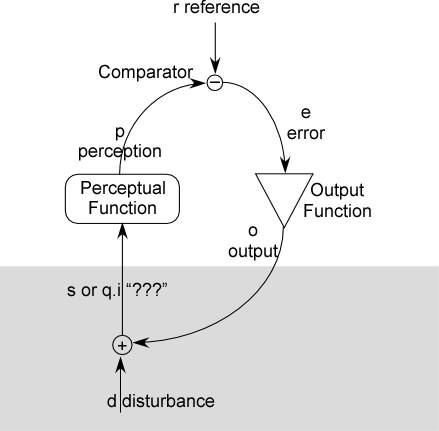
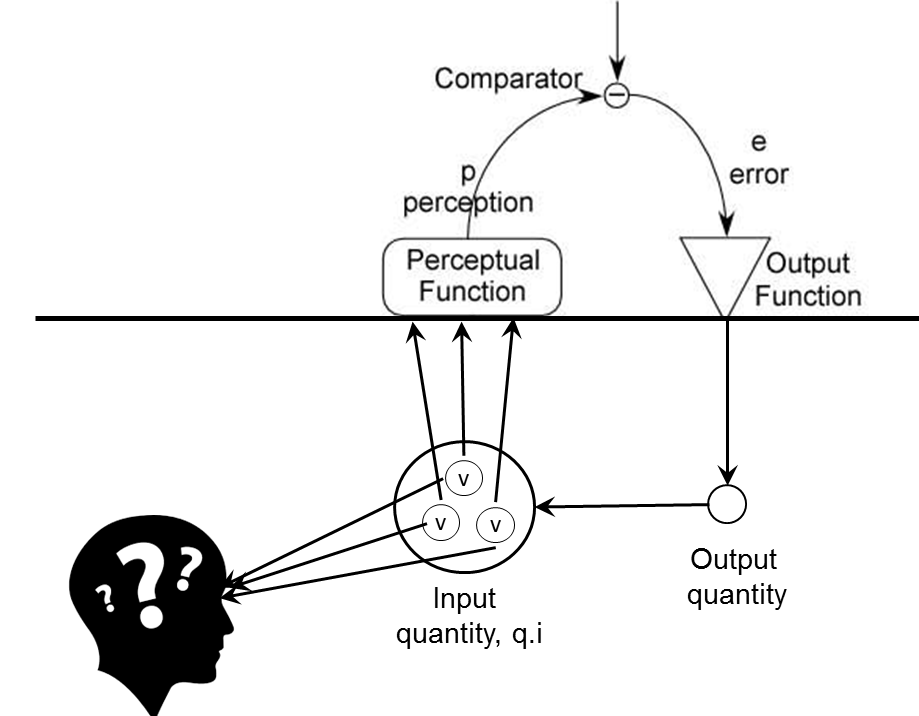
HB : What you prefer is really your problem but it would be good if you also inform members of CSGnet, that Bill is using »Input quantiy, sensed quantity« what is much better term to understand that nothing in environment is controlled and that there is no »Controlled Quantity« that is controlled in environment, just the »sensed quantity« that is controlled in comparator. And there is no »Controlled behavior« and no »Controlled Perceptual Variable« which is already containing »control«. These wrong terms are your contruct (RCT). PCT diagram looks like (down) and it has specific terms which where by the words of Barb carefully chosen by Bill :
![cid:image003.jpg@01D23694.7341FD90]()
What you are perceiving Rick is just the »sum« of effects which are entering »input function«. Your »phylosophy« above is really a masterpeace. But you can see from Bills’ work how this control loop really work. It’s »Control of perception«. Why don’t you give us your explanation of Bills’ diagram LCS III. I think that best explanation how diagrma works is Bills’ example with a »glass«.
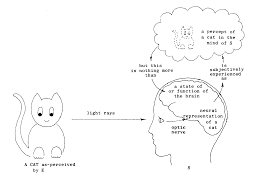
Bill P :
What you are experiencing is not the obejct outside you but a set of neural signals representing something outside you….You are directly experiencing the signals in youur brain that represnt the world outside you. There is no second way to know about the skin, the wrinkles, the fingernails, the palm, and so on. There is only one way, through neural signals, and you are looking art them.
HB : By the way ,which is that another way of perceiving »reality« that Bill mentioned ?
Bill P.
Our only view of the real world is our view of the neural signals that represent it, inside our own brains. When we act to make a perception change to our more desireble state – when wee make perception of the glass change from “on the table” to " near the mouth" – we have no direct knowledge of what we aree doing to the reality that is the origin of our neural signal; we know only the final result, how the result looks, feels, smells, sounds, tastes, and so forth.
HB : Rick, wouldn’t you just stick to Bills’ latest terminology and diagram in LCS III, so that you could avoid conflicts with PCT. Why you PREFER YOUR TERMINOLOGY instead of Bills’ ? Why do you prefer »Behavior is Control«, »Controlled Perceptual variable« and so on. Why don’t you use Bills’ terminology like »Control of perception«, »perceptual signal«, »affected envrionment« and so on, what’s the real core of PCT ?
If you are doing this because you published all those nonsense books and articles and now you want to change PCT to RCT so that it would »conform« to your nonsense articles, books, demos and so on, than you are making even greater damage to PCT than you did.
Best,
Boris
RM: Another way I thought of to keep this straight is to think of environmental variables as the argument of a function that results in what we experience as perception. The flaw in the concept of the CEV is that it mistakes the argument for the function.
Best regards
Rick
The “ah ha” part for me was to realize that the environment holds innumerable possibilities for perceptual regularities, but the key is always which (small) subset of them will matter enough to me to control. In other words, the PCT mantra that “It’s all perception.”
Yes, there seems to be an environmental substrate for perception, but the only interface we have is through the perceptions we construct, so the environment remains unknowable in itself. The best we can hope for is that it may be infer-able. And that occurs through the “reality test” (can I call it that?) built into every act of control. If the perceptions we’ve constructed are too far unhinged from the reality that is supposedly out there in that environment, then our efforts at control will not be very good. We’ll keep getting frustrated because the environment doesn’t seem to be cooperating. In such circumstances, it is likely our constructed perceptions that are not cooperating. They are too much at odds from the (unknowable) substrate out there.
So in terms of Martin’s diagram (I think it was in [Martin Taylor 2016.10.16.10.32]), I think I would pretty much cover the environmental portion below the line with even dimmer dots and lines, and then allow certain dots and connections to be slightly bolder (ala Martin’s scheme), corresponding with what is above the line in the organism’s particular set of constructed perceptions. That would suggest that for this organism, certain environmental regularities are more “useful” than others, while still conveying that there remains a universe of untapped possibilities left to others to construct and perceive.
I basically agree with Rupert’s query about the concept of a Complex Environmental Variable, to whit:
[RY] What does it (CEV) add to the theory, that is not already captured by the current
understanding of perceptual control loop and processes?
All the best,
Erling
NOTICE: This e-mail communication (including any attachments) is CONFIDENTIAL and the materials contained herein are PRIVILEGED and intended only for disclosure to or use by the person(s) listed above. If you are neither the intended recipient(s), nor a person responsible for the delivery of this communication to the intended recipient(s), you are hereby notified that any retention, dissemination, distribution or copying of this communication is strictly prohibited. If you have received this communication in error, please notify me immediately by using the “reply” feature or by calling me at the number listed above, and then immediately delete this message and all attachments from your computer. Thank you.
–
Richard S. Marken
“The childhood of the human race is far from over. We have a long way to go before most people will understand that what they do for others is just as important to their well-being as what they do for themselves.” – William T. Powers