The “arrangements of the common environment” that people produce – things like tools, roads, schools, etc – are already part of the PCT model as the components of the feedback paths that implement the feedback functions that relate people’s outputs to their controlled inputs. Your new definition of “feedback path” seems, at best, unnecessary and, at worst, confusing.
I don’t know what you mean by “reduce complexity by omission rather than by generalization to theoretical entities”. I’ll just say that my model of phonemic drift accounts for the variations in phoneme pronunciation across subpopulations that were observed by Labov in the same way that Bill’s model of crowd behavior accounts for the patterns formed by groups of individuals in the different situations observed by McPhail. Like Bill’s CROWD model, my phonemic drift model demonstrates how the behavior of collectives of control systems should be studied: by comparing the behavior of a model to the behavior of actual collectives of individual controllers.
Actually, the agents in both the model and in reality can “compare a perception of their own speech to that of others”.
That cogent recognition was a guess about how we are able to imitate behaviors that we can’t see ourselves doing, such as imitating the facial expressions of others. But we are able to hear what we say; indeed, if we are not deaf then there is good evidence that what we are controlling when we speak is the perception of the sound we are producing ourselves.
I have been thinking through those implications since about 1978. That’s why my model of phonemic drift controls perception, not output. The perception that is controlled is a measure of the pronunciation of diphthongs called the centralization index (CI). Individuals in the model control a perception of their own pronunciation, CI.self, as the means of reducing the difference between their own pronunciation and that of others, CI.other. This difference is controlled by varying the reference for the system controlling CI.self.
On each iteration of the model, each individual interacts with another. In each of these encounters, the reference for each individual’s CI.self is brought closer to CI.other. Over many iterations, the average of all references for CI.self – and, hence, the average CI.self – stabilizes at some value, as shown in this graph:
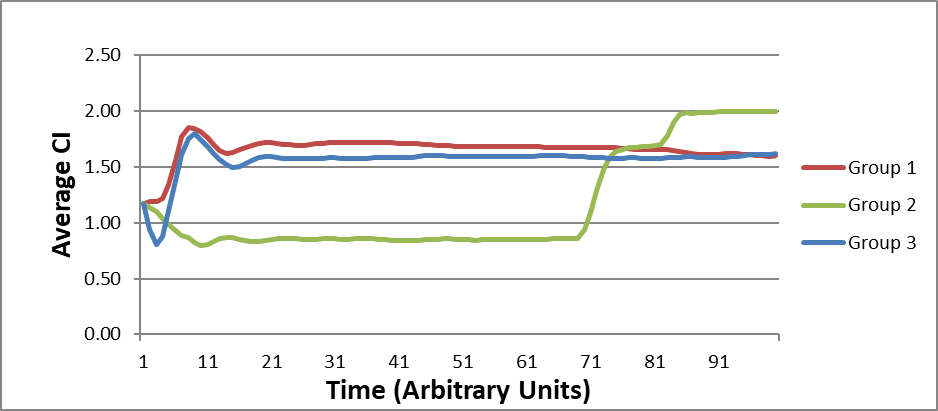
“Average CI” is the average value of CI.self (and, thus, the average value of CI) in the model. The graph shows variations in the average CI value for three separate groups. These groups were all part of the same population so they start with the same average CI value. The graph shows what happens when the Groups are separated so that the individuals in each group interact only with members of their own Group. The CI averages can be seen to quickly diverge but eventually settle down to different, fairly stable values. But this stability is rather fragile as we see the average CI of Group 2 suddenly diverging to a new value after a long period of stability.
I developed a perceptual control model that accounts for an observed phenomenon: the difference in pronunciation in different subgroups of a population. I didn’t throw in all the variables you mention because there was nothing in the data that suggested that they were relevant to the results. The only thing that seemed relevant to the data I wanted to account for – the regional difference in pronunciation – was the likely tendency of speakers in each region to speak mostly with others in their region. So I guessed that this might account for the regional difference in pronunciation if people control for speaking like the people they mainly speak with. The model can easily be expanded to account for pronunciation differences across variables besides region, such as social class, occupation, etc.
I’m sure you can use the theoretical entities of collective control to identify pertinent perceptual variables. But I can’t because, in PCT, theoretical entities (controlled perceptions, reference states of controlled perceptions, hierarchical arrangement of control systems, etc.) are constrained by data (controlled variables, reference states of controlled variables, nesting of control in terms of timing, etc.).
I don’t understand why you say that my comment is sophistry. According to the dictionary, sophistry is “a fallacious argument, especially one used deliberately to deceive”(emphasis mine). So you think I was intentionally making a false statement in order to deceive? That’s a pretty serious accusation. I think it would have made for a friendlier conversation if you had just said that my statement was false and corrected me (kind of like what I’m doing in reply to all those statements of yours above). But I would really like to know how you determined that my purportedly false statement was intended to deceive. And I would also appreciate it if you could explain why you think my statement was false.
Thanks so much. Have a nice day.