The study of control begins with the observation of control as a phenomenon. A variable perceived by the investigator has a reference value to which it is returned when the investigator applies (or observes the occurrence of) a disturbance. Control is a phenomenon observed in the environment.
In the forms of PCT research with which we are most familiar and comfortable, the investigator identifies perceptual inputs and effective outputs of a single control system, tests them, and verifies that they are essential to the functioning of a control loop closed through the environment. Then work can proceed with experiment, measurements, modeling, documentation, demonstration.
When no single control system can be identified as the unique controller, and yet the observed variable indisputably is under control, we have a more difficult task. We have entered uncharted territory for PCT; or, rather, territory which is only beginning to be charted.
The typology of collective control so far proposed in baby steps is unlikely exhaustively to account for every example that is found. You have three choices, seems to me, when a variable is said to be under control, though not by a unique, single controller. (1) Show that the variable is in fact not under control. (2) Join in the investigation into how control of the variable is accomplished — what control systems are involved and how they contribute to the net result, the maintenance of control over that variable. (3) Get out of the way.
I don’t see how this could happen. Could you give me a concrete example of where, after a variable has been observed to be “indisputably” under control, the observers go off to find the unique control system doing the controlling and fail to find it.
I agree. I am totally unfamiliar with that territory.
What is the typology of “collective control”? I thought we had agreed that “collective control” refers to Kent’s model of a bunch of controllers controlling the same variable relative to the same or different reference specifications. As far as I can tell, this model has only accounted for two examples of collective control: 1) tug of war type interactions and 2) cooperative control that occurs in the very unlikely event that two or more agents suddenly adopt the same reference specification for the same variable at the same time.
I am already doing 1) in discussions on this forum (demonstration of Dead Zone and spreadsheet showing large increase in error in agents keeping a variable in a “virtual reference state”) and 2) in Chapter 7 of SLCS.
I have given you many examples. Consider (perhaps for the first time) the perception of a crosswalk in a street. Some people control this perception as part of controlling sequences for getting from a variety of starting locations to a variety of intended endpoints, in each case as means of controlling some other perceptions (shopping in store X or store Y, going to a restaurant or bar or gym, going to town hall to complain about the paint of the crosswalk being so eroded that they felt in danger crossing the street, returning from any of these places). Some people control this perception of a crosswalk for purposes of maintaining it as part of their job. An artist sitting at a sidewalk table nearby controls it as part of a composition on her sketchpad. A traffic consultant hired by the city controls it within a complex model of traffic flows. Each of these very different CVs is controlled by feedback through the environment. The cause-effect feedback paths are different, but they intersect in perceptions of this aspect of the environment, the crosswalk painted from one side to the other of the roadway. The traffic consultant (a role for which he trained and was hired) may give advice to people elected and appointed to roles in town government which eventually will affect what all the others perceive in that stretch of street pavement and will affect how they will control their diverse CVs. Such roles are perceptions that no one individual controls solo.
No one has agreed with you that this is the limit and extent of collective control.
An agreement is another example of a perception which is under control but which cannot be controlled by one person solo. Roles, such as traffic consultant, Manager of the Department of Public Works, personal injury lawyer, customer and sales clerk, diner and waiter, are controlled perceptions that cannot be controlled by one person alone. In a joke of course you might put a lawyer alone on a desert island, but what makes the lawyer role the butt of the joke is that in that imagined circumstance he would no longer be a lawyer. Tom Hanks in ‘Castaway’ was Director of what?
Guess what? Such locutions as “You know what?” are perceptions that many people recognize and control in recognized ways, and which are controlled solo by no one individual. It’s a simple protocol. Protocol and role are terms that are important in PCT when we take seriously the observation that we are social animals living with others in a built environment comprising controlled variables that we rely on others to keep reliably under control. The Internet over which we share this text, the electrical power supply that lights your monitor and enables your computer to function, the phone call that you recently made or soon enough will make, and so on and on and thoughtlessly on, until control lapses (power outage, ISP drops your connection) at which point you call on someone in a role that includes fixing such problems, or you just wait helplessly frustrated that you are in fact dependent on others’ participation in collective control of variables without which your self-centered control fails.
A crosswalk is not a variable. So it can’t be a controlled perceptual variable.
The variable these people are controlling (CV) is the relationship between themselves and the crosswalk, maintaining it at the reference “within the crosswalk”. The crosswalk is a disturbance to this perceptual variable; an independent environmental effect on the perceptual variable being controlled.
The CV here is something like the degree of harmony in the relationship between components of the composition, including the crosswalk. The crosswalk is again a disturbance to this perceptual variable.
Here the variable controlled is the location of crosswalks in the traffic flow model. In this case the crosswalks are outputs of the control system (traffic consultant) who puts crosswalk symbols into the traffic flow model.
In all three cases the individual controlling the CV is easily visible. No one has to go off and try to find the unique control system doing the controlling. But if someone did, it’s unlikely that they would fail to find him or her.
Of course. All controlled variables are controlled via outputs that have their effect on the CV via the environment.
This is incorrect. The crosswalk has nothing to do with the feedback paths involved in the control of any one of the three controlled variables described above. That’s because the crosswalk is a disturbance to the variables controlled in the first two cases and an output that is used to control the variable described in the third. The feedback function in all three cases are the physics that relate system outputs (walking, applying paint or placing crosswalk symbols on the traffic flow model) to the controlled perceptions (walking within the crosswalk, painting her masterpiece, proper placement of crosswalks in the model).
Such roles can only be controlled by the person in that role; only the traffic consultant can control for being a traffic consultant; only an elected government official can control for being an elected government official, etc.
No one in CSG or in this group has agreed with me since May, 2013. But forget the limits. I thought we had agreed that “collective control” refers to Kent’s model, where a group of controllers are controlling the same variable relative to the same or different reference specifications. Are we still there, at least?
This is true by definition. There is an “agreement” only when all parties to some decision indicate that they agree with all other parties.
I’m not quite clear about what you mean by this. Only the person him or herself can become these things. Maybe you mean that a person alone couldn’t produce the behaviors associated with these roles without other people around. If that’s what you mean then I agree.
Again, I’m not sure I understand. For example, I am able to control for producing locutions such as “You know what?” that many people recognize (but that no one but me is controlling) and I can do it all by myself. The people I “locute” it to almost always reply by saying “What?”. And they seem to be able to produce that reply all by themselves as well.
“Protocol” and “role” are terms that refer to observed behavioral phenomena. They are no more important in PCT than any other terms describing behavioral phenomena, such as “peace” or “insurrection”. The only word describing a phenomenon that is uniquely important in PCT is CONTROL!
I am well aware of the prevalence and importance of the controlling done by groups of individuals. I know that I get by with a little help from my friends. I’m not saying that what you call “collective control” (and what I call “social control”) doesn’t exist or is not as important as individual control (again I point you to Chapter 7 in SCLS). I am just questioning your approach to understanding such phenomena.
So if a perception does not vary it’s not controlled. Interesting idea.
The example refers to workers, e.g. people in the Department of Public Works who maintain the crosswalk, from the Director down to the line-painting crew. These workers are controlling the variation of the crosswalk as it deteriorates. They’re not controlling a perception of their immediate relationship to the space between the lines of the crosswalk (except possibly incidentally in the course of working).
Your response applies to someone walking from a place on one side of the street (an apartment, a parking lot, a parked car, …) to a place on the other side. The perceptions that constitute the crosswalk are a part of the environmental feedback paths of their respective control loops.
In a simple model of motor control the environmental feedback function is a mathematical function written so as to encapsulate physical cause-effect relationships in the environment between effector outputs and relevant sensed physical variables. In more complex control situations the environmental feedback function cannot be so simply encapsulated. It is necessary to recognize segments in an environmental feedback path. Usually, this is not literally a path as in this case of sequence control walking from point A to point B. Environmental feedback paths include “states of physical objects or patterns of other organisms’ actions that can be used by an organism to keep its perceptions in control” (McClelland 2020:234).
Humans (and other organisms) alter their environment, creating and maintaining stabilities in the environment that can be relied upon as segments in environmental feedback paths for controlling perceptions of various kinds. Those who rely on a segment s for control of some variable X find their control disturbed if s can no longer function as well (or at all) in the environmental feedback path for their control of X. If they then act to restore the utility of s for their purposes, it becomes clear that they were not merely paying attention to s in the course of controlling X, they actually were controlling s. As usual, all it takes is a disturbance to find that out.
“…when people take physical action to arrange some aspect of the environment and then continue to act to maintain the stability of that arrangement in the face of disturbances, observers can reasonably infer that the people are imposing their own reference conditions on the aspect of the environment that appears to be stabilized” (McClelland 2020:231).
“The kinds of activities described as work in everyday language are activities that create stable feedback paths in a shared environment for the benefit of other people. The word is also commonly used to refer to the kinds of activities that maintain these feedback paths in place. Thus, work activities produce some kind of environmental stabilization…. Manual workers create stable feedback paths by manipulating physical objects; they build things, make things, and clean things up. Agricultural workers produce fields of crops and confinements full of animals to be used as food. Transportation workers move truckloads of products from factories to stores, where sales workers make those products available to customers in exchanges with predictably structured protocols. Service workers manipulate and stabilize the immediate physical environments of individuals, including their dwellings and even their physical bodies, as barbers and hairdressers do. Healthcare workers attempt to stabilize the physiological functioning of people’s bodies. Educators strive to turn out classes of graduates with predictable abilities and skills, people who can then be hired to put their skills to work creating various kinds of feedback paths for others. Government workers maintain stability and order for the community in a wide variety of ways, from removing trash to providing and enforcing laws designed to regulate commercial transactions and maintain public order, and thus preventing large disturbances that would make control of other perceptions difficult” (McClelland 2020:280).
Environmental stabilities are perceptions that are controlled by workers doing work. They are vulnerable to disturbances—environmental deterioration, sabotage, obsolescence as relevant populations of people control differently or control different perceptions, obsolescence due to change in other work-product stabilities causally related to this one, etc. This is what makes them variables, although we may imagine that they are constants (as you have done) because we need them to be reliable. Such disturbances are resisted by ‘fixing’ the problematic environmental stability. (“Fix” makes a completely apt pun.) Those who are unable to control well because of such disturbances resist the disturbances by calling on workers to fix the problem.
Why do you assume it is a disturbance? Just curious.
I should have said that when you say that a “perception of a crosswalk is controlled” it is not clear what variable is being controlled. How do control a crosswalk? Do you control its visual appearance, location, condition, relationship to users, etc?
Sorry, I misunderstood what you said. I thought you were talking about people regularly using the crosswalk for the purpose of getting to their job. But you were actually referring to the people who physically maintain the crosswalk. So the variable they are controlling is the “condition of the crosswalk” and the reference state of that variable is “good”.
Yes, but the “perceptions that constitute that crosswalk” are not part of the environmental feedback path. The environmental feedback path is in the environment; to paraphrase Mae West, “perception has nothing to do with it”.
I don’t see why the feedback function can’t always be represented as a fairly “simple mathematical function”, no matter how complex the physical connection between system output and controlled variable. In the case of walking, for example, the feedback function is Newton’s laws. The equation relating system output (force, F, exerted against the ground by the take off leg) to input (acceleration, a, of the body over the landing leg) is something like a = F/m, so the feedback function is 1/m.
And in our tracking tasks we model the very complex feedback path from mouse movement (m) to cursor movement (c) via the computer as a simple linear equation: c = k * m so the feedback function is just k.
Have you guys done some modeling where a simple mathematical feedback function doesn’t work? And if so, what does work?
I think what you are saying, phrased in terms of a specific example, is that we get a washing machine (s) fixed when it stops working. That shows that we are not only controlling for getting the clothes clean (X); we are also controlling for keeping our means for getting the clothes clean (s) working. And I certainly agree with this.
The washing machine is the in the feedback path relating my actions (putting clothes in it) to getting them clean. So when I use the washing machine, “cleanliness” is the CV (measured as grams of dirt removed?) and the energy I use to put the clothes into the washer is my output (measured in joules?). The washing machine is the feedback path between output and CV and it can be represent as a coefficient, k, the shows how much the CV is affected by my output: CV = k* Output. So k is the feedback function in grams/ joule.
This is just a first cut, of course, but I hope you can see how apparently complex feedback paths can, at least in principle, be represented as fairly simple mathematical functions when analyzing the behavior of a control system (such as me doing the laundry).
Yes, of course. We are descendants of Homo habilis, the handy primate. And our tools have gotten pretty complex.
Then why call them “stabilities”? They are controlled results of actions – controlled variables – so why not just call them that? They are sometimes simple (like hammers) but often very complex (like computers) controlled variables.
In this situation, the crosswalk is a disturbance because the artist is not affecting it with his or her actions. The crosswalk is just “out there” in the scene being painted. The painting is what is being controlled – in particular, the accuracy of representation of the visual scene, a relationship perception. Everything in the actual scene would be included as a disturbance in a PCT model of what the artist is doing because they are independent effects – independent of the artists actions – on the CV.
These disturbances – the contents of the visual scene – determine what the artist has to do with the paint and brushes, which is his or her output, in order to bring the CV – the accuracy of the representation of the visual scene – to its reference state, which is “perfect”, or, if the artist is from Minnesota, “pretty darn good”. You betcha’
An important distinction. The environment feedback function represents cause-effect phenomena that we understand to be in the environment. Often enough a person controlling doesn’t perceive all of the physical variables, or the cause-effect relations among them.
In the phenomena of interest here, more than one perception is controlled in the course of controlling a higher-level perception. Each perception is an element in the environmental feedback path for controlling the higher-level perception.
For a supposedly asocial experimental setup the distinction seems vacuous. But we are talking about more than one person controlling their respective perceptions of some aspect of the environment being reliably in a state which enables them to control it within the environmental feedback path for their respective control of other perceptions that matter to them.
Note that even in a simple motor control experiment the apparatus must reliably function the same way for every run and for every subject, subjects must have the same instructions, and so on. The experimenter must control the stability of many segments of at least two partly intersecting environmental feedback paths, that of the controlling subject and that of the controlled experiment as a whole, lest confounding variables creep in.
This can be done for segments of an environmental feedback path, yes, for individual control loops involved in execution of a more encompassing control loop.
Good! Then you can see that in addition to controlling corporeal relationship to the space between the lines of the crosswalk the person crossing the street is controlling the reliable visibility of the lines not only to herself but also to others, e.g. drivers of cars. So likewise the driver jamming on brakes and cursing at a jaywalker emerging between parked cars and grumbling that the crosswalk is only ten feet farther. So likewise untold numbers of other people in that public control, for diverse purposes, the reliable presence of lines painted on the street.
Because they are not merely controlled perceptions controlled by one person, and because the net effect of their control by many people episodically (not continuously by anyone) is to maintain them stably fit for use as a segment of the environmental feedback path for any perception they may happen to control by those means, whenever that need arises. Look around: thus is your built universe furnished.
[Thanks for your explanation of why the artist’s subject is a disturbance and the properties and disposition of the artist’s media are not. I disagree about how artists work, but no matter. Off topic.]
This is almost always true. But I have done “simple motor control experiments” where a segment of the environmental feedback path from output to controlled variable was intentionally made unstable. The purpose of the study was to see if that instability would impair a person’s ability to control, and it did not. So stability of segments of the feedback path in a control loop is not actually a requirement for good control, which is a good thing since many (most?) non-human made feedback paths are unstable. But a stable feedback path doesn’t hurt.
No, I can’t see that. I have seen people control the relationship between themselves and lines of the crosswalk. But I have never seen any of those same people control the visibility of the crosswalk lines.
The driver stopping abruptly and cursing at a pedestrian is not also controlling the reliable visibility of the lines. The untold numbers of other people controlling for the reliable presence of the lines painted on the street are all working for the road maintenance dept.
That doesn’t seem like a good reason, especially since “stability” is not control. It’s unnecessarily confusing and hides the most important explanatory concept of PCT, which is that these control-aiding artifacts are themselves produced by a process of control.
I think it would be better to call them “reference states of controlled variables”. Computers, smart phones, the internet, hammers, nails, drills, houses, streets, cars, etc. are all controlled results of the actions of many individual controllers. The fact that these artifacts are being maintained in reference states by the activities of many rather than a single individual is certainly an important thing to know. But ultimately the process that produces these artefacts must be explained in terms of the controlling done by each individual and how that controlling relates to that being done by all the others in the collective.
You refer here to cause-effect segments in the environmental feedback function involved in controlling a relatively simple low-level perception. Each segment of an environmental feedback path is the environmental portion of a perceptual control loop.
Sure you have. You’ve done it yourself, the same way you control a perception of the sun setting on the western horizon. You can’t control that perceptual input at all unless you first have directed your organs of perception appropriately to receive that perception. If you’re controlling the spatial relationship of your body to the crosswalk, zero perception of crosswalk produces an error signal. What do you do to reduce that error? If the crosswalk is obscured by cars, you might crane your neck, or lean to peer over parked cars, or otherwise get your eyes where they can receive that perceptual input. If the contrast of paint to pavement is poor (it’s worn, or the light is dim, or the light of your headlights reflects away from you off the water-filled irregularities in wet pavement instead of back toward you, etc.) you might squint. (For those who don’t know about pinhole cameras, here is an explanation why squinting helps.) Complaining that the lines need repainting isn’t the only way to control their visibility, but it is another way.
Really? Could have sworn I heard him mutter “You idiot! Can’t you see that crosswalk? You’ll get yourself killed jumping out between cars like that!”
When you go to the bathroom you want toilet paper to be reliably present in the accustomed toilet paper holder. You don’t want to have to stand up and waddle off to get some after defecating. Yes, this reliability is accomplished by control, but (unless you’re the only person in the house using the toilet paper) the controlling is not done by one person solo. When you go to the kitchen sink to put some water in your coffee maker you expect that turning the tap reliably results in a flow of water. Who controls that reliable presence of water pressure to every faucet in your house, neighborhood, and town? You unquestionably control a perception of its reliable presence.
Modeling of collectively controlled variables must be grounded in control by individuals. That is the foundation layer of PCT. Building upon that foundation, how the controlling by one “relates to that being done by all the others in the collective” now becomes the important work.
Yes. It is a theoretical entity that can sometimes help make the complexity of collective control manageable so that we can grasp concepts and processes, and work can proceed, just as ‘neural current’ and ‘neural bundle’ are theoretical entities that make neurophysiological complexity manageable so that the work of developing PCT of individual control systems could proceed and can be carried on now.
A ‘giant virtual controller’ (GVC) is
an array of functionally independent individual control loops that act together in any ordinary test, such as ‘The Test for the Controlled Variable', as though only one variable was being controlled, even though none of the component control loops was controlling that exact variable. (*PPC* II p. 307.)
If many different highly skilled artists are each asked to draw a ‘circle’, none of their productions will be geometric circles, though to the untrained eye they may all look as though they are. If the untrained observer sees enough of these productions, the concept of the geometric circle is likely to become a reference, a Platonic ideal, for a perception that might possibly be controlled, whether or not a formal definition of a ‘circle’ is available.
The reference ‘Platonic’ ideal circle compared to the artists’ renditions is analogous to the [Collective CV] as compared to the individual [CVs]. The [Collective CV] is whatever function of environmental variables most closely resembles all of the [CVs] of the collective controllers. If one of the individual controllers changes the reference value for its perception of its [CV], that change will be reflected in a smaller change of the [Collective CV]. In what follows, we will often use shorthand language, and say that the [Collective CV] is controlled by a GVC (Giant Virtual Controller), even though the [Collective CV] actually corresponds to a controlled virtual perception that is some average of slightly different perceptions controlled by the various actors. (*PPC* III.1.5 pp. 18-19.)
(The terms in square braces are my spelling-out of abbreviations, to head off distractions about terminology.)
This doesn’t seem to be relevant to the point of my experiments, which was to show that stability of the segments of the feedback path in a control loop is not a requirement for good control. Much of what you say or imply in your statement above is incorrect.
Contrary to what you imply about my "simple motor control experiments”, I did manipulate a component of the feedback path in a tracking task, and I did it in order to vary the characteristics of the feedback function.
The fact that a relatively simple, low level perception is the CV in a “simple motor control experiment” is irrelevant; all of our demos use control of simple perceptions to illustrate general principles of the controlling done by living systems.
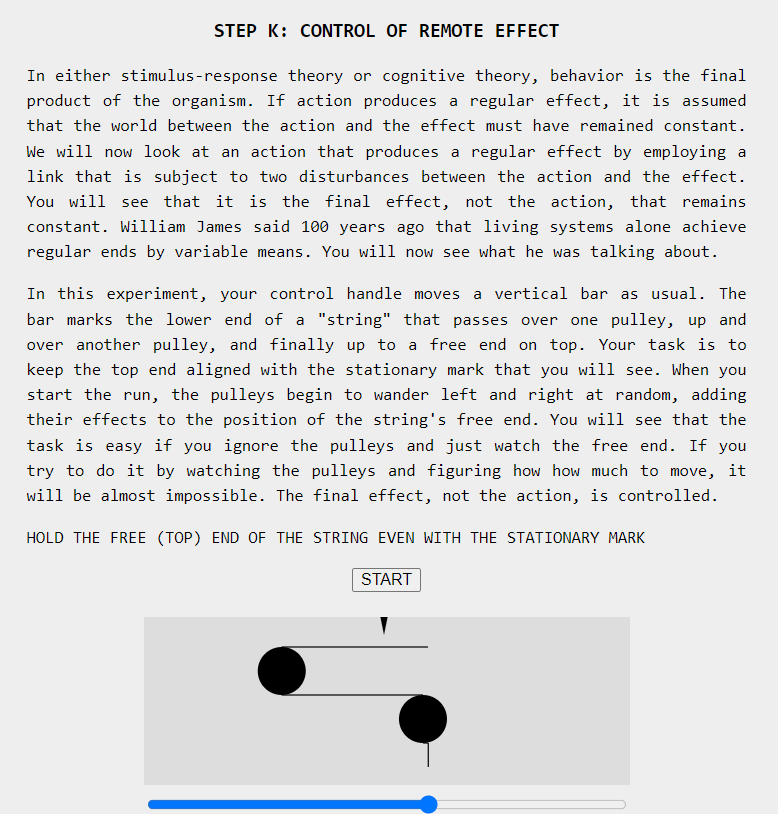
It is true that each segment of the environmental feedback path is the environmental portion of a control loop. But this has no bearing on whether a stable feedback path is needed for control. Indeed, Bill Powers showed that such stability was not needed. This was demonstrated in STEP K of his PCT Labs demos that have been beautifully re-written by Adam Matic to run on-line.
Here is a screenshot of the Step K demo showing the feedback path from output (the blue bar at the bottom of the display) to the controlled variable (the distance between the pointer at the top of the display and the right end of the horizontal line directly below it.
The feedback path consists of two pulleys that are disturbed by being slowly and randomly moved horizontally. This movement continuously changes the feedback path and, hence, the feedback function relating output to controlled variable. And yet this instability of the feedback path (and function) does not hinder the ability to control the CV, a fact that you can demonstrate to yourself by doing the demo .
Actually, you had said that the person crossing the street is controlling the reliable visibility of the crosswalk lines “not only to herself but also to others, e.g. drivers of cars.” She can’t do that by squinting.
Yes, Really.
There is no causal connection (feedback path) between these words and anything that has to do with a perception of whatever you mean by “the reliable visibility of the crosswalk lines”.
From reading Kent’s papers I got the impression that the virtual control exhibited by a collective of controllers – the giant virtual controller – was what explained social “stabilities” all the time, not just sometimes. Is it now thought that some other process accounts for the times when the giant virtual controller doesn’t account for these stabilities?
This is a rather odd definition of the GVC. It misses the most important characteristic of a GVC, which is that the independent control loops are controlling essentially the same perceptual variable relative to different reference specifications for that state of that variable. The “essentially the same” perceptual variables that are being controlled must be functions of the same physical reality or there is no conflict and, thus, no virtual control. And, contrary to what is said above, it doesn’t appear as though only one variable is being controlled by a GVC; one variable is being controlled, though the control is virtual since there is no control in the Dead Zone of a virtually controlled variable and all the participants who make up the GVC are experiencing far more error than they would be if the variable were actually (not virtually) under control.
If this is supposed to be a description of the virtual controlling being done by the GVC then it is just wrong. Many different highly skilled artists, each drawing a slightly different ‘circle’, is NOT a GVC. Moreover, there is nothing in PCT that suggests that an untrained observer who sees enough of these productions will likely develop a reference for a perception that might possibly be controlled. This is actually an S-R theory of the situation with a dab of PCT jargon thrown in at the end: seeing many different circles (S) causes (with some probability) the development of a reference (R) for a perception that might (with some probability) be controlled.
I have seen better descriptions of the GVC model elsewhere. But I still would like to see how the model explains real social phenomena. I’ve shown, in Ch. 7 of SLCS, how non-GVC models can account for several different social phenomena. It would be great if someone could do the same for the GVC model. And by “explanation” I mean fitting the GVC model to actual data. Verbal explanations don’t count as a way of testing models in PCT.
No, as your description says you model “…an action that produces a regular effect by employing a link that is subject to two disturbances between the action and the effect.” A single cause-effect link (a.k.a. feedback function) within a single control loop. A feedback path involves more than one control loop, each with its environmental feedback function.
Is this supposed to be a ‘gotcha!’ that proves something? Nor does dialing Town Hall on her phone help her to see the crosswalk on a rainy night. The feedback path for verifying that an oncoming driver is obeying the law about pedestrians in crosswalks is not the same as the feedback path for complaining about deterioration of a crosswalk. The two feedback paths intersect at a loop controlling relationships to the crosswalk. Controlling a relationship to the crosswalk requires perception of the crosswalk (present perception in the first case, past and remembered/imagined in the second). The two feedback paths then diverge again. In the first case, the visibility of the crosswalk to the oncoming driver may be enhanced by pausing, looking the driver in the eyes, perhaps gesturing toward the crosswalk; in the second case perhaps by making a telephone call, by talking to a nearby cop, by walking a block and a half to Town Hall and into someone’s office, and so on. Choice of which environmental feedback link to employ next in a perhaps novel environmental feedback path is controlled at the planning level (a.k.a. ‘program’ level).
(a) The pedestrian can hear the driver. The driver is controlling mutual acceptance and conformity to a public regulation of vehicle and pedestrian traffic. Part of the perceptual input, both for the communication and for the regulation, is visual perception of the crosswalk. The driver is explicitly enjoining the pedestrian to control his sensory input functions so as to increase the visibility of the crosswalk. (b) The pedestrian can’t hear the driver, but the driver is controlling all of the above in imagination.
That would be an appropriate critique if we were talking about the cause-effect links within the environmental feedback function of a single control loop. By your logic, we could say that words never have any causal effect beyond oscillations of air pressure. The causal effects of words are always mediated by collectively controlled variables in environmental feedback paths. An environmental feedback path is complex, meaning, it comprises more than one perceptual control loop, each closed through its own environmental feedback function.
The theoretical entity can always be reduced, at least in principle, to the details of control by individuals. In a smaller collective, with some public variables, such a detailed study can be feasible. In a city of 30,000 individuals, any one of whom might at one time or another act in a way that affects the state of a public facility such as a crosswalk or the water pressure, no one currently knows how to undertake such a project, but it’s at least conceivable.
However, the empirical basis of the GVC is not there, it is in the observation of control (a CV with its reference value) together with the observation that no one agent’s control accounts for it, though many contribute to it at least episodically.
There is no requirement that they have different reference values for the CCV. That is true only for the first kind of collective control named in Martin’s short taxonomy of collective control (PPC III.1.7).
Martin did not say that is a description of virtual control. In the very next sentence, which you omitted to quote, he presented it as an analogy.
Ideal is to individual renditions as CCV is to individual CVs.
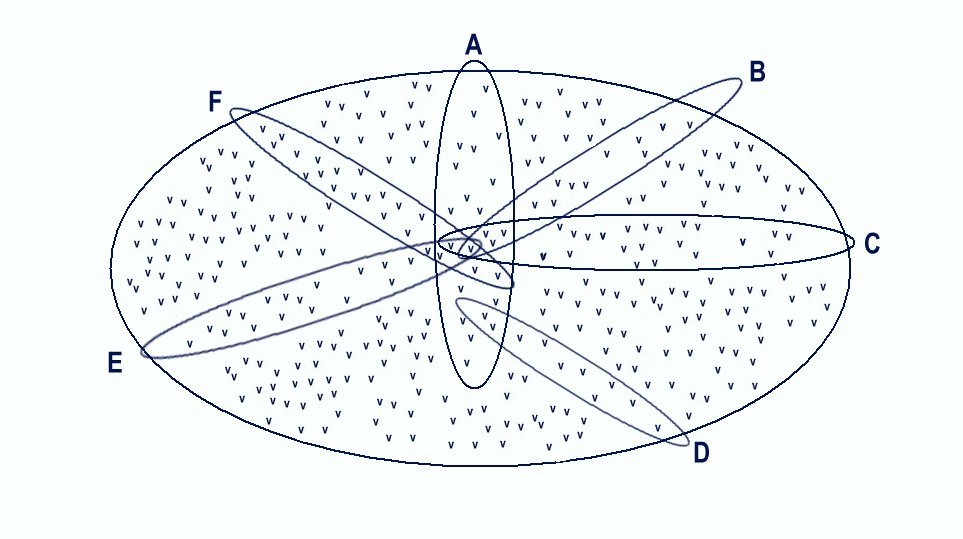
I used this image that I used at our recent conference to suggest (in a crude schematic way) the intersection of environmental feedback paths:
Controllers A, B, C, E, and F all control the variable v near the center for their respective purposes. The ellipses do not represent control loops, they only indicate the boundaries within which fall variables that a given agent is controlling. The purpose of this diagram was only to communicate the concept of intersecting environmental feedback paths.
Great! As Bill said to someone years ago, it’s a wide-open field still in its infancy.
Start with the phenomenon of control, a perceptual variable which, whenever it is disturbed, gets returned to its reference value due to the environmental effects of the actions of living control systems. If the actions of only one LCS accounts for the phenomenon, it’s not collective control. You might have to observe over a protracted period of time to be sure nobody else is concerned with that variable. If more than one puts in an oar to keep the variable on track, then you can start investigating who, how, why, when, and where. Collectively controlled variables often have standardized values. Primitively, control actions serving divergent individual reference values bring the CCV to a value which it is difficult for any individual to change, because the sum of the gains of all loops is greater than the gain of any individual’s loop. The resistance of a CCV is in effect an entity in the environment that you can make use of, within its limits. A utilitarian ‘OK, I can live with that’ consensus about its reference value is a first step to ‘folk’ standardization. Standardization is often a top-down formal process. In more democratic systems of governance there are public hearings, etc. Undue influence in these social processes by vested interests, that’s a well-known collective control phenomenon. Often roles are created (a role is a collectively controlled perception) such that a person acting in the role more frequently or regularly maintains the CCV at its reference value, and others may then control by communicating to the person in that role, or to a person in a related role who communicates to that person, and so on. The communication itself is carried out by means of collectively controlled variables such as this word.
Social phenomena are complicated. Even for interactions between two people, such as when one person shifts the values of variables in their pronunciation to be more like (or unlike) the corresponding variables that they hear in the other’s speech, it is necessary to model perception of one’s own outputs and comparison with perceptions of the other’s corresponding outputs (and modeling on what basis they are ‘corresponding’). This has never been done in a PCT demonstration or simulation.
There is no singular GVC interacting with the individual controllers, but it is a useful theoretical concept for understanding and modeling collective control phenomena without getting lost in the weeds. Neural bundle and firing rate are theoretical entities with the same stochastic basis and the same utility for understanding and modeling control phenomena in individuals without getting lost in the weeds.
The feedback path that you describe here is not part of the PCT model as I understand it. I think it’s a new addition to PCT that was invented by people who theorize without testing those theories against data. But you can disabuse me of that notion by presenting a functional diagram of what you call a “feedback path” and showing how it maps to some real world behavior (data).
No, I’m just trying to show you how to map PCT to actual behavior.
Since I don’t know what you mean by “feedback path” I don’t know what point you are trying to make here. In PCT the feedback path is a causal path connecting system output to controlled input; it determines the nature of the feedback function. Given this definition, the feedback paths you mention are, indeed, quite different. The feedback path for verifying that an oncoming driver is obeying the law would go from from the muscle forces that orient the eyes (output) to the image of the driver relative to the crosswalk (CV); the feedback path for complaining about deterioration of a crosswalk would go from the muscle forces that produce the complaint (output) to the words that are being spoken (CV).
I don’t understand how feedback paths intersect?
Here’s how I understand what you are saying. The system that is controlling a relationship to the crosswalk is presumably a person who is controlling for verifying that an oncoming driver is obeying the law about pedestrians in crosswalks and controlling for complaining about deterioration of the crosswalk. These perceptions could be controlled as the means of controlling the more general perception of a “relationship to the crosswalk”. Given the PCT meaning of feedback path, there is, indeed, no intersection of feedback paths in this scenario.
In order to choose between feedback paths (take one path rather than another) a person has to be able to perceive these paths and then use their output systems to take the path that satisfies some higher level goal. That is, the person must control for perceiving herself taking the path specified by a higher level control system.
So it sounds to me like your feedback path is equivalent to what is called a controlled variable in PCT.
I question your assumptions about what is being controlled here but at least you do seem to conclude that there is no controlling of the reliable visibility of the crosswalk lines. Such controlling would at the very least require some paint!
Mine is the “logic” of PCT and that model assumes that the pressure variations that are the outputs of a human speaker do have causal effects beyond oscillations of air pressure. They cause, in both speakers and listeners, perceptions of many different types – intensities, sensations, configurations…principles and system concepts. In theory, anyway.
How can the causal effect of words be “mediated” by things that happen in the environment?
In PCT, the causal effects of the acoustic oscillations that are perceived as words are mediated by perceptual functions that construct higher order perceptions from the word perceptions. These oscillations can also evoke (cause) associations, such as visual images like this when a word, like “apple”, is perceived. But all this causing is going on inside the brain, not in the environment.
But why adopt a model of a virtual controller when most (all?) of the examples of controlling done by multiple agents seem to involve real control… For example, some variable - such as the state of aproduct like an iPhone – is brought to and maintained in a reference state that seems to be OK with everyone involved in production; the reference state of the iPhone 15 Pro, for example, doesn’t seem to be the average of the references of all the agents involved in its production.
There is, indeed, such a requirement if you are going to call it a virtual controller. The “virtual” refers to the fact that the CCV is being kept in a virtual reference state, which is proportional to the average of the references of all participants. If all the controllers in the collective are controlling the CCV relative to the same reference specification, then you would have real, not virtual, control.
Then it is a very poor analogy. The artists should be described as trying to control the same circle at the same time relative to different references for circularity. But he doesn’t describe them this way. Then he comes up with a magical explanation of why some outside observer would develop a virtual reference – the average of all the artists’ separately drawn circles.
No, it is (or should be) analogous to the virtual reference level, which is the reference specification for the CCV. But Martin’s analogy is not the correct analogy of how this Platonic ideal (virtual reference level) comes about. It comes about from conflict between the controllers over the desired (reference) state of the CCV (the circle).
The correct analogy would be to have the outputs of all the artists connected to the pen that is drawing the circle. All the artists would be pushing the pen in slightly different trajectories in an effort to produce a circle that matches their different references. The resulting circle would reflect the average of all thee artists’ different references – the virtual reference level of the Giant Virtual Controller (GVC), which is made up of the collection of artists.
I’m afraid I am even more confused about what you mean by “feedback path” after viewing this diagram than I was before viewing it. When evaluating what purports to be a PCT model of some phenomenon I like to see a control system diagram, not a Venn diagram.
I didn’t see any fitting of the GVC model to actual data in this treatise of yours so I’ll just assume that the GVC model is not ready for prime time. Or any time, for that matter.
It has been done and doing it is no more complicated than modeling any particular individual behavior. My model of pronunciation drift in relatively isolated subpopulations (described in section 7.1.3 of SCLS) does exactly what you say it doesn’t: it models individuals as control systems that compare a perception of their own speech to that of others and act to make that difference approach a reference value of 0 on each interaction.
The model shows how anything – geography, occupation, class, etc – that leads members of subgroups in a population to mainly interact with teach other will result in convergence of each subgroup’s pronunciation to centroids that differ from each other and from the centroid of the parent population. Nice, simple, quantitative PCT explanation of an apparently complex phenomenon.
This is true. The PCT model of individuals’ behavior is part of an investigation of the arrangements of their common environment that they establish and maintain socially.
The reason the nonverbal image is associated with the same word ‘apple’ in both sender and receiver is that this association is a collectively controlled variable that has been maintained as such in their common environment throughout their lives as speaker/hearers and and reader/writers of English.
Because for any social phenomenon of interest identifying, measuring, and modeling all of the individual control loops effecting the British phenomenon of ‘teatime’ is overwhelmingly complicated, just as tracking every neural axon, dendrite, and synapse involved in an individual controlling one sip of tea is overwhelmingly complicated. In the latter case, we simplify to stochastically-based theoretical generalizations such as ‘neural bundle’ transmitting a ‘neural signal’ with a sinqle-quantity ‘rate of firing’. So likewise must we in order to model social phenomena.
Go ahead and model all the control loops that result in the ongoing state of your iPhone while you are reading this post on it.
Nice, simple, and wrong. Your proposed models of collective control reduce complexity by omission rather than by generalization to theoretical entities. And your description of it is a falsehood. The agents in your proposed model of dialect convergence do not “compare a perception of their own speech to that of others”. They have no perception of one another’s outputs and so cannot perceive similarity or difference between them. As you cogently recognized some years ago, the signals in ‘mirror neurons’ are probably reference signals. Think through the implications of an observer producing reference signals for controlling by means of outputs like those observed in the other. Think about the observable phenomenon of one individual attributing motivations to another.
At a higher level in the hierarchy, the agents in your model have no perceptions of esteem or disfavor for individuals and identified classes of individuals because they have none of the perceptions of conflict and enabling, none of the planning, principle, and system concept perceptions that are affected by such conflict and enabling, none of the associative processes that generalize from helpful or hindering individuals to a class of individuals considered to be alike on the basis of perceptions such as features of speaking perceived in members of that class, no perception of the career paths associated with one class or the other, no planning of possible career paths by adolescents, no limitation of the locus of dialect change in the subpopulation of adolescents, and so on. You simplified everything that is humanly relevant in this to a variable of proximity. And the resultant model is unable to account for those in one location who chose the dialect associated with the other.
Using the theoretical entities of collective control one could identify the pertinent perceptual variables, assess their relative contributions and their variation over time, identify effective sub-populations, and so on, not getting lost in the detail of every individual’s control loops on every occasion. It is possible, in principle, to drill down to that detail for any of the involved individuals, just as it is possible in principle to drill down to the neurophysiological and neurodynamic electrical and chemical transactions involved in every repetition of taking a sip of tea. Such detail is the usually presumed, sometimes verified, always verifiable at least in principle, basis of the theoretical entities that are represented in a model.
I can play sophistry too. The numerous motor neurons connecting to muscle fibers in the right bicep do not all carry the identical signal, so sipping a cup of tea is virtual control.
Thanks for clearing all this up for me, Bruce. It makes me realize how much I miss Bill!
In case there is anyone out there who would be interested in learning what the PCT approach to understanding social phenomena looks like, I recommend the following:
McPhail, C., Powers, W. T., & Tucker, C. W. (1992). Simulating individual and collective action in temporary gatherings. Social Science Computer Review, 10, 1-28.
The “arrangements of the common environment” that people produce – things like tools, roads, schools, etc – are already part of the PCT model as the components of the feedback paths that implement the feedback functions that relate people’s outputs to their controlled inputs. Your new definition of “feedback path” seems, at best, unnecessary and, at worst, confusing.
I don’t know what you mean by “reduce complexity by omission rather than by generalization to theoretical entities”. I’ll just say that my model of phonemic drift accounts for the variations in phoneme pronunciation across subpopulations that were observed by Labov in the same way that Bill’s model of crowd behavior accounts for the patterns formed by groups of individuals in the different situations observed by McPhail. Like Bill’s CROWD model, my phonemic drift model demonstrates how the behavior of collectives of control systems should be studied: by comparing the behavior of a model to the behavior of actual collectives of individual controllers.
Actually, the agents in both the model and in reality can “compare a perception of their own speech to that of others”.
That cogent recognition was a guess about how we are able to imitate behaviors that we can’t see ourselves doing, such as imitating the facial expressions of others. But we are able to hear what we say; indeed, if we are not deaf then there is good evidence that what we are controlling when we speak is the perception of the sound we are producing ourselves.
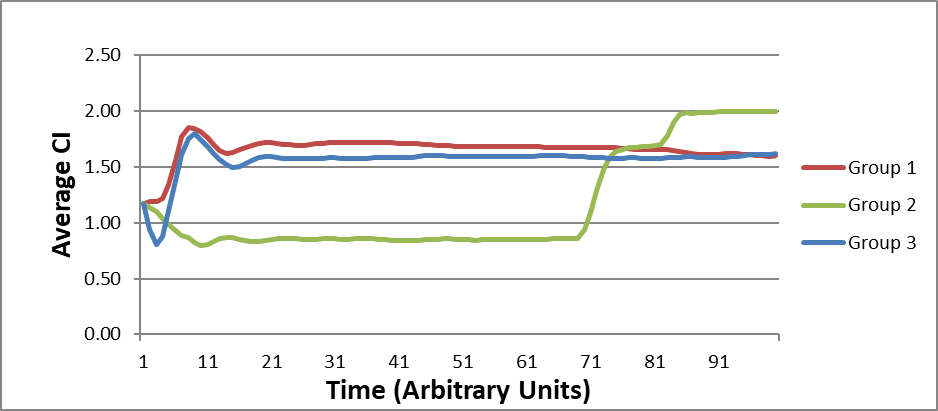
I have been thinking through those implications since about 1978. That’s why my model of phonemic drift controls perception, not output. The perception that is controlled is a measure of the pronunciation of diphthongs called the centralization index (CI). Individuals in the model control a perception of their own pronunciation, CI.self, as the means of reducing the difference between their own pronunciation and that of others, CI.other. This difference is controlled by varying the reference for the system controlling CI.self.
On each iteration of the model, each individual interacts with another. In each of these encounters, the reference for each individual’s CI.self is brought closer to CI.other. Over many iterations, the average of all references for CI.self – and, hence, the average CI.self – stabilizes at some value, as shown in this graph:
“Average CI” is the average value of CI.self (and, thus, the average value of CI) in the model. The graph shows variations in the average CI value for three separate groups. These groups were all part of the same population so they start with the same average CI value. The graph shows what happens when the Groups are separated so that the individuals in each group interact only with members of their own Group. The CI averages can be seen to quickly diverge but eventually settle down to different, fairly stable values. But this stability is rather fragile as we see the average CI of Group 2 suddenly diverging to a new value after a long period of stability.
I developed a perceptual control model that accounts for an observed phenomenon: the difference in pronunciation in different subgroups of a population. I didn’t throw in all the variables you mention because there was nothing in the data that suggested that they were relevant to the results. The only thing that seemed relevant to the data I wanted to account for – the regional difference in pronunciation – was the likely tendency of speakers in each region to speak mostly with others in their region. So I guessed that this might account for the regional difference in pronunciation if people control for speaking like the people they mainly speak with. The model can easily be expanded to account for pronunciation differences across variables besides region, such as social class, occupation, etc.
I’m sure you can use the theoretical entities of collective control to identify pertinent perceptual variables. But I can’t because, in PCT, theoretical entities (controlled perceptions, reference states of controlled perceptions, hierarchical arrangement of control systems, etc.) are constrained bydata (controlled variables, reference states of controlled variables, nesting of control in terms of timing, etc.).
I don’t understand why you say that my comment is sophistry. According to the dictionary, sophistry is “a fallacious argument, especially one used deliberately to deceive”(emphasis mine). So you think I was intentionally making a false statement in order to deceive? That’s a pretty serious accusation. I think it would have made for a friendlier conversation if you had just said that my statement was false and corrected me (kind of like what I’m doing in reply to all those statements of yours above). But I would really like to know how you determined that my purportedly false statement was intended to deceive. And I would also appreciate it if you could explain why you think my statement was false.
Perceptions of these objects, processes, etc. are themselves controlled perceptions, but there is no single controller controlling them. That phenomenon of collective control has been part of the PCT model for twenty years.
What time is it? Did you recently change the time on your clocks and watches by one hour? What were you controlling by doing that? What was the cause of the change? Was the change a disturbance to anything else you were controlling? If you resisted the change, did your resistance have any effect on the time of day? Why not?
The Random House Dictionary says
sophistry
/sof"euh stree/, n., pl. sophistries.
1. a subtle, tricky, superficially plausible, but generally fallacious method of reasoning.
2. a false argument; sophism.
It was wrong of me to use a term which beginning with Plato’s school has been collectively controlled as being derogatory. My apology. It was also poor strategy on my part, because it enabled you to focus on feeling insulted and ignore the substance.
To the substance:
One could with equal justification say that sipping a cup of tea is virtual control, because the numerous motor neurons connecting to muscle fibers in the right bicep do not all carry the identical signal. The reference state for configuration of the right elbow (as part of controlling the relation of cup to lip and the relation of cup to saucer) is proportional to the average of all neural firings and the fatigue-moderated contraction of all involved muscle fibers.
In each case, it is the net effect of diverse outputs that determines the observed reference value as an environmental phenomenon.
Your comments on Labov’s research into an anomalous dialect change intersect a different topic. I’ll reply in a long overdue reply to your post of last February, “Re-thinking Labov’s Pronunciation Drift Data”. The discussion is relevant to the present topic because the higher levels of control (omitted from your model) involve collectively controlled perceptions of two ‘kinds’ of people, Islanders and ‘summer people’, and decisions by adolescents which kind of person they intend to be.
Summer people, typified as those from Boston and New York, are differentiated from Islanders by a number of perceptual variables such as clothing, shopping and dining habits, and pronunciation of can’t, of postvocalic r, and of a higher frequency for both of the first two formants in the initial /a/ vowel of diphthongs, a.k.a. ‘centralization’.
Members of each group control not only recognized shibboleths of membership (such as designer clothing and postvocalic r) but also less salient variables. They control these variables with convergent reference values. The reference values within a group converge not because proximity in an encounter has a magical effect of changing reference values, but rather because by that means they control being perceived by others as a member of one group or the other, and they control other higher-level variables by control of being perceived as a peer in one group or another. To control being perceived as a peer/member an individual must control the relevant perceptions at the requisite reference levels. The perceptions and their reference levels are collectively controlled. The individual doesn’t get to decide these things, they are observable facts in the environment.
This is irrelevant to the role of these “objects, processes, etc.” in the feedback path. There were many people involved in the production of the computer hardware and software that I use to do my tracking task but in order to understand my behavior in that task all you have to know about this feedback path is how that hardware and software converts my mouse movements (o) into effects on the cursor (c), and this feedback function can be written as a simple linear function: c = k*o.
I agree. And no one called it “collective control” because it was obvious that it was controlling done by more than one individual that produces a result that could not have been produced by only one of those individuals on their own.
These are all questions about my individual controlling. I don’t know why you asked them but here’s my answers: 3:06 PM PDT. No, I changed them several days ago. I was controlling for changing the time from PST to PDT. The cause of the change was different for the different clocks. I turned dials on some of the clocks, pushed buttons on others and some were changed automatically by software. The change did create disturbances to some things I controlled, such as driving east at 4 PM; the setting sun was a disturbance to control of my view of the relationship of the car to the road, which was corrected by me pulling down the sun shade.
I tried to focus on the fact that I was being insulted by you, not on how I felt about it.
One could say that, but not with “equal justification”. Sipping a cup of tea is not virtual control because the numerous motor neurons connecting to muscle fibers in the right bicep are all part of the same control loop so there is no conflict. In virtual control the diverse outputs affecting the virtually controlled variable come from different control systems, each with different references for the state of that variable. And, as I noted in my talk at the IAPCT conference, it is possible to empirically distinguish a virtual from an actual reference state because there is a Dead Zone in the former but not the latter.
Thanks for referring to that post of mine. I think it’s pretty good. I look forward to seeing your reply.
Sounds like one variable – “kind of person you want to be” with two possible values: Islander and summer person. And how do you know this is a controlled variable, let alone a “collectively” controlled one?
This seems like a difference that could be easily explained by my imitation model of phonetic drift. The difference in the the way people dress, shop, dine, pronounce can’t, postvocalic r, and ‘centralization’ seems to be consistent with the idea that people imitate those who they interact with the most: Summer people interact for most of the year with other Bostonians or New Yorkers and Islanders interact all year with other Islanders.
The only observable facts you describe are the observed differences between summer people and Islanders. The theory your come up with to explain these facts is very similar to my imitation model. Both models explain the differences between groups as a result of “convergent reference values”. The difference between these models is in our assumptions about what makes this convergence happen.
In my model the convergence happens because people imitate the pronunciation of those they interact with most. In your model the converge happens because “people control for being perceived by others as a member of one group or the other”. That is, they imitate the people in the group they want to be in so that they will be seen as members of that group.
Both models could be right but I think there are data that work against yours. The main problem is that Summer people come from Boston or New York while the Islanders come from the island. So, there are very likely to be rather large initial differences between these people in their references for food, shopping, pronunciation, etc. before Summer vacation time. It seems unlikely that those differences arose in Summer people out of a desire to be seen as Bostonians or New Yorkers and in Islanders out of a desire to be seen as Islanders.
It is one form of collective control, where a collective of individuals are controlling for the same or a similar perceptual aspect of the environment in parallel; that is, without affecting how the same perceptions controlled by others. For example, the Islanders can pronounce “can’t” like a Kennedy without affecting (helpfully or disturbingly) each other’s ability to pronounce it that way and without affecting the Summer people’s ability to pronounce it like a New Yorker.
Rick defends PCT from the addition of anything extraneous or unnecessary to it. Most of what has been said about collective control he perceives as adding something extraneous or unnecessary to PCT.
I agree that PCT as presently formulated can and should account for all of the phenomena of behavior.
When control is poor, organs of perceptual input are directed toward the sources of perceptual inputs which are not well controlled. This is the outwardly observable aspect of what is called ‘attention’. When poor quality of control persists, new perceptual input functions may be created. [To digress into a PCT account of learning would be off topic here; that should go under Learning Phenomena or Research > Learning.] A subjective way of putting this is that the environment influences what we pay attention to, and the environment influences what we learn to perceive which we could not previously perceive.
Talk of the environment influencing us might sound like stimuli causing our behavior, but that is not what I am saying. It would be strange to deny that we are influenced by what happens and that we influence one another. That informal observation does not make us behaviorists. So how do we talk about influence more formally in PCT terms?
A basic principle of HPCT is that the reference level for a control loop is determined by error output from a higher level. The error output is determined by input from the environment
relative to the reference value for the higher-level loop. In this way, the reference level for the lower-level CV is subject to influence from the environment by way of error in the higher-level CV. That ‘influence’ is ‘from the environment’ insofar as the higher-level loop is closed through the environment.
This is all entirely within canonical HPCT.
Most of the interesting phenomena of collective control involve people’s influence upon what higher-level perceptions one should control and upon one another’s reference values for those higher-level perceptions. A social organization is characterized as such by its CVs. The individuals may not control those CVs with identical reference values, in fact are unlikely to, but an individual who does not control them is not in that social organization. A person who does not understand the fundamentals of PCT is not a member of the PCT community. A person who does not speak Portuguese is not a member of the Portuguese speech community.
One kind of question for PCT is how did the individuals in a social organization acquire the perceptual input functions that are necessary for participation and membership? Again, details of learning theory are another topic, suffice to say here in the intersection with collective control that the activity of the reorganization system must be constrained and directed under influence from others in the social organization. There must be higher-level systems in the learning individual which control perceiving being recognized, perceiving that what they say and do is understood as they intend, and so on.
Membership in a society or a culture may seem less precisely defined than language fluency or acceptance in discussions of PCT. In great measure this impression is because we acquire the necessary perceptual input functions and learn to control their inputs competently in childhood, and as adults it is all controlled quite unconsciously. Spending a little time as a foreigner is instructively uncomfortable.
A great many higher-level CVs have as inputs perceptions of what others do, perceptions of one’s own environmental situations and actions within those situations, and perceptions of likeness or difference between the other-perceptions and the self-perceptions. A couple of fictional and stereotypical examples may be enough of a reminder.
“Geeze, there’s no way I can park in this spot with his car half into my space. How can somebody be so inconsiderate?”
“Oh, heck, let me try again.”
“John, we’re going to be late!”
“Hop out and go in, I’ll catch up. I can’t take up two spaces. This is a busy hospital.”
In (1), the driver criticizes another for not controlling collectively controlled perceptions (what is a parking space? What is the appropriate relationship of a parked car to its parking space?) at appropriate reference values (“Geez, did he even see the lines?”). In (2), the driver acts to reduce error in his personal control of the same perceptions. She imagines the effect of poor control upon others who are also controlling those perceptions. This imagining of the effect on others is I believe an important part of collective control. (The interesting forms, setting aside the crudity of mindless conflict. By ‘mindless’ I mean lacking a higher level that sets the reference value for ‘my’ side of the conflict and a yet higher level that may begin controlling its input by alternative means.)
The higher-level perceptions controlled in those two examples are of a sort commonly identified under the general rubric of ‘responsibility’. There are others that we could characterize by a rubric of ‘intelligibility’ (such as, most obviously, the perceptions that constitute a language) or ‘legibility’ (such as the postural adjustments, added to the observable functional consequences of controlling locomotion, by which mutually approaching pedestrians indicate their intended paths and avoid collisions).
Rick has asked for help establishing a database of perceptions that we control, and has offered a spreadsheet in which to collect them. The descriptions are necessarily skeletal, given the format, but they could include links to more deliberate discussion.
Not quite. My basic problem with what has been said about “collective control” is that it is untested and, therefore, not necessarily true. This includes what I consider to be unnecessary additions to the theory, such as “atenfels”, as well as claims about what the theory explains, such as the idea that the reference state of a virtual controlled variable explains social stabilities.
My problem with what you and others have said about “collective control” was perfectly described by Bill Powers in a post to CSGNet way back in 1995. In that post Bill explains why he has problems (he calls it “friction”) with just about everything Martin Taylor says about PCT. When you read the post you’ll see that Bill’s problems center around Martin’s proposed additions to and deductions from the premises of the theory.
Bill notes that these problems stem from the fact that he and Martin take fundamentally different approaches to PCT. Bill takes an engineering approach, which involves testing the correctness of theory-based predictions against observation, while Martin takes a mathematical - logical approach, which involves proving the correctness of theory-based deductions using the rules of logic. I think Bill makes a strong case for Martin’s approach being wrong (a mistake).
I have added highlights to the sections of the post that seem particularly relevant to our current “friction” over “collective control”. An example of one of these highlighted sections is here:
BP: This…explains to me your disdain for “mere demonstrations.” If you have worked out the logic correctly, what is the point in doing an actual demonstration of it, and doing different demonstrations to bring out one point or another?
It seems to me that I have heard something similar from you about my “mere demonstrations”, most recently of my demonstration of the ability of my imitation model to explain Labov’s observation of different average pronunciations of the same diphthongs in different geographical locations.
As Bill says at the end of his post “I have no illusions about changing your style to correct what I see as mistakes”. But Bill’s post eloquently describes why we have had (and will surely continue to have) this constant friction about “collective control” (and many other things as well). We just have different approaches to understanding PCT. And, like Bill, I think it’s pretty clear that your approach is wrong.