[From Rick Marken (2017.10.14.1220)]
![]()

CauseControl.pdf (815 KB)
···
RM: in their simplest form these equations are:
p = g(o + d) (environment function)
o = f(r-p)Â Â (system function)
 Dag Forssell (2017.10.12.1535 EDT)–DF: Rick you have used these two equations for over 20 years to support your various arguments.
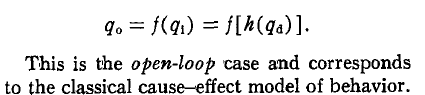
RM:Â Actually, more like 37 years. And during that time Bill Powers had plenty of chances to chide me for using those equations if he thought they were wrong. But he didn’t because they were just fine; indeed, they are virtually the same equations that Bill uses to explain the behavioral illusion in his 1978 Psych Review paper. Here are the equations Bill used to derive the behavioral illusion.Â
RM: In equation 2 q.i is the controlled variable, equivalent to p in my equation, and q.o is the output variable, equivalent to o in my equation. This is the “environment equation” for the control system. The difference between Bill’s and my environment equations are 1) I didn’t include the disturbance function, h(), and 2) in mine, d should not have been included in the argument to the feedback function, g(); I should have written it p = g(o) + d.Â
RM: Bill’s equation 1 is the system function and the argument to f() is expanded out later in the article as q.i* - q.i, where q.i* corresponds to r in my equation. So Bill’s system equation is notated q.o = f(q.i* - q.i) – output is a function of error – while mine is notated o = f(r-p) – output is a function of error. But obviously Bill’s and my equations are equivalent.
Â
DF: Never do you emphasize that these equations never apply in real life. As Powers put it, they represent a steady state.
RM: Bill called it a quasi-static analysis. These are not really steady-state equations since they describe the relationship between variables that vary over time. And I did say that they are approximations; what is approximated is the equals sign in the solution to the simultaneous algebraic equations. That is, the equation for p should be:
p ~ r rather than p = r
where ~ means approximately equal to, the approximation approaching equality as loop gain approaches infinity.
and the equation for o should be
o ~ -1/g (d) rather than o = -1/g(d)
where again the approximation approaches equality as loop gain approaches infinity.
DF: The instant anything changes, whether disturbance or reference signal, the equations change dramatically.
RM: The equations don’t change but the variables are certainly changing, over time. But I think you are saying this based on Bruce Abbott’s little tutorial where he used a sequential state analysis to explain how the disturbance can be shown to be the cause of output because it changes before the output changes. But, in fact, the disturbance cannot be considered the cause of output. The reason is given in Bill’s and my environment equations: per Bill’s equation 2, the controlled input variable, q.i, is proportional to the sum of the output and disturbance variables (q.o + q.d). All that the system perceives is q.i. Â
RM: Let’s assume that the reference for q.i, q.i*, is some value, such as 7 (all numbers are in neural signal units). The value of q.i at any instant depends simultaneously on the current values of both q.o and q.d. So if q.i is 5, the system doesn’t know if that’s because q.o = 0 and q.d = 5 (as Bruce assumed in his tutorial) or because q.o = 5 and q.d = 0. That is, q.i could equal 5 because the disturbance alone is causing this of because the system alone is causing this. Indeed, at any instant, a q.i value of 5 could result from an infinite combination of values of q.o and q.d that add to 5. All the system knows is that q.i is 5 and, therefore, less than q.i* (7 in this case); so there is error that will cause a change in the current value of the output. It is thus the deviation of the controlled variable, q.i, from the reference, q.i* – that is, error – that is the cause of output in a control loop.Â
RM: So the only variable that actually causes the output of a control system is the error variable, q.i*-q.i; the system acts to keep error small by producing outputs that will appear to an observer to be caused by the disturbance. But, in fact, it is error that is the cause of output. And output is, at the same time, a cause of error (causing it to be reduced).
RM: The appearance that output is caused by the disturbance is, therefore, an illusion. The process by which a control system produces output that appears to be caused by the disturbance is explained by the control model! There is no need to introduce non-existent causal mechanisms to explain this. And the essential part of that explanation is a description of the variable that is being controlled, q.i; the controlled variable. That is, the focus of research aimed at explaining the controlling (purposeful behavior) of organisms should be on identifying controlled variables; not on identifying the causes of control system output; the latter is explained by the control model once q.i is identified.
RM: The sequential state analysis that purports to show that disturbances cause outputs is a fiction originally invented by Martin Taylor (back in the early 1990s). Apparently Bruce A. has taken it up now too. I suspect they do this to justify the study of control systems using conventional methods of behavioral research – research based on what Bill called the old cause-effect model of behavior. But this sequential state analysis is easily shown to be incorrect; indeed, that’s what my very first PCT research study showed. I’ve attached it for your reading pleasure. It shows that there is no way for the disturbance to be considered the cause of control movements; and that the true cause of control movements, variations in deviations of q.i from some reference state, would not be seen as the cause since they have virtually no relationship to outputs. I did this research and published this paper – in 1980! – as my “shot across the bow” of scientific psychology to warn that a revolution is coming, one that would require a whole different approach to studying the behavior of living system. Clearly, scientific psychology was (and is) not cringing in fear;-) Â
DF: Your equations would apply if the control system has infinite loop gain.
RM: That is correct, though I did say that they are approximations when I used = signs. But changing the = to ~ fixes that.
DF: For many of the situations discussed here on CSGnet, loop gain is rather low.
 RM: I don’t believe that’s true. Humans control very skillfully which means that nearly everything we do involves controlling with very high gain. Â
DF: Martin usually argues from a perspective that does not presume infinite loop gain. I wish you would too. It is much more real.
RM: I never assume infinite loop gain. And in my research I develop very accurate control models that have high gain but no where near infinite loop gain. Martin and Bruce A. are trying to superimpose the old cause-effect model of behavior onto PCT. And everyone on CSGNet who’s been involved in these discussion seems to agree with them – that the disturbance is a cause of output. So I’m posting this knowing that it is unlikely that I’ll convince anyone that the apparent causal relationship between disturbance and output in a control loop is an illusion; but it can’t hurt to keep trying.Â
BestÂ
Rick
–
Richard S. MarkenÂ
"Perfection is achieved not when you have nothing more to add, but when you
have nothing left to take away.�
                --Antoine de Saint-Exupery
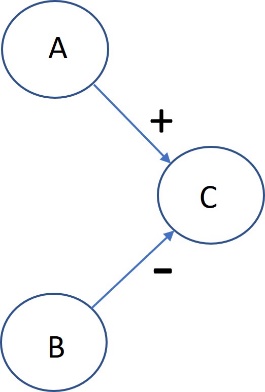
 BA: Here, variation in A and/or B cause variation in C. The effects of A and B on C are in opposite directions, as indicated by the plus and minus signs. If only A varies, then C will vary directly with A. If only B varies, then C will vary inversely with B. If both A and B vary, then C will vary with the difference between A and B. Most people I know would say that variations in both A and B are causes of variation in C.
BA: Here, variation in A and/or B cause variation in C. The effects of A and B on C are in opposite directions, as indicated by the plus and minus signs. If only A varies, then C will vary directly with A. If only B varies, then C will vary inversely with B. If both A and B vary, then C will vary with the difference between A and B. Most people I know would say that variations in both A and B are causes of variation in C.