RM: But the actual forward functional relationship between qd and qo – the one described by equation (9) – is still in effect !
AM: No, this is not correct. The forward path is still in effect, but the functional relationships are changed because of feedback.
RM: I don’t see anything in the 1978 paper that suggests that this is the case.
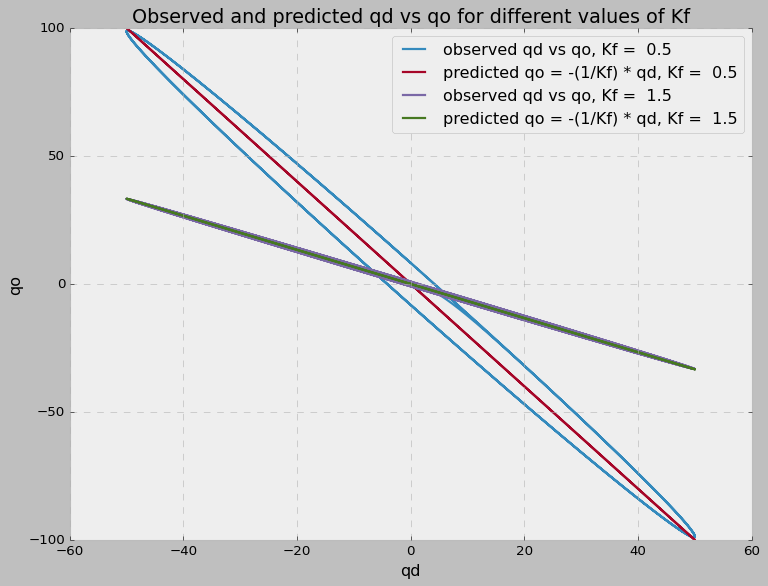
You don’t see how the qd-qo function is changed because of feedback? You mean the abstract form of the function? Because the qd-qo plot surely changes.
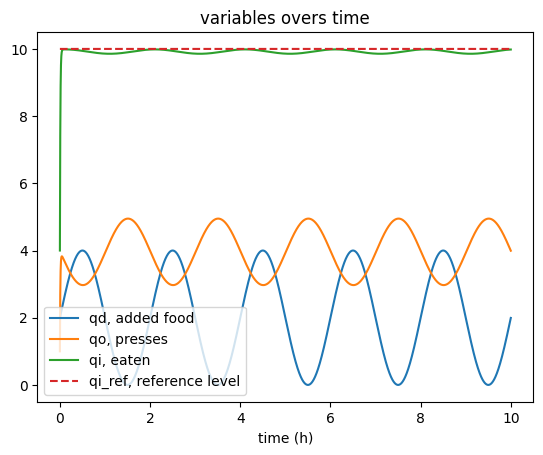
Cool, I have the same thing in simulation:
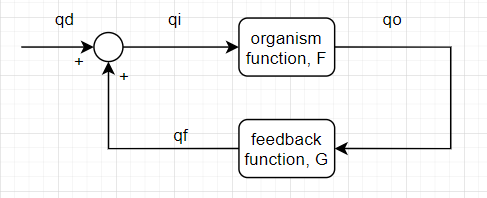
Here is the diagram that applies to the simulation and also to your experiment:
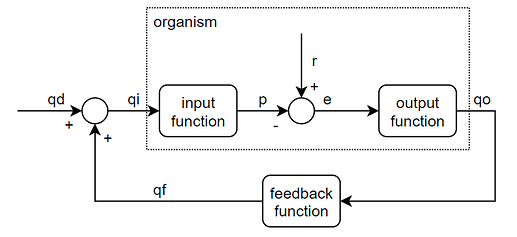
All the lines are signals, and all the circles and boxes are functions (not the same as Bill’s diagram in first post where lines are functions)
The feedback function is relating qo and qf.
A summing function is relating qi to qd and qf. That is the little circle on the left, sometimes called a summer, but often left nameless. A similar function in the middle relating e to r and p is usually called a comparator.
The feedback function is relating qf to qo, as in qf = G(qo)
This is also true in your code for the spider simulation:
https://www.mindreadings.com/ControlDemo/Illusion.js
in stepRun you have:
xpos = (-d[session][n]) + mx*1.5;
so to put it in terms of the diagram, qi = d + qo * Kf.
The feedback function is G is 1.5* x or qf = 1.5 * qo.
RM: According to you, the change in the qd-qo relationship with a change in the feedback function reflects an actual change in the forward path through the organism from qd to qo
No. According to me, closing the loop changes the functional relationship between qd and qo, it does not change the forward path. When the loop is closed, to quote myself:
AM: the forward path is still in effect, but the functional relationships are changed because of feedback.
Changing the feedback function also changes the functional relationship between qd and qo, without any changes in the forward path, as demonstrated by both your and my demos. The only thing we changed was the Kf, and the functional relationship between qd and qo also changed.
What I mean when I say that the functional relationship between qd and qo has changed is that the two lines that represent two situations with strong and weak feedback have a different slope.
In the first case, qo = -2 * qd. In the second case qo = -0.66 * qd.
You seem to have a different understanding what “functional relationship” means when you say
RM: More compelling is the fact that these results can be precisely replicated by a model in which the functional relationship between qd and qo remains exactly the same when the feedback function changes from weak to strong.
In the abstract form, for ideal N system, it is always valid that qo = G^-1(qd). This abstract form does not change with changes in parameters.
I mean, I THINK my use of the idiom is correct. A functional relationship such as a = 2b is different from a = 3b, even though both are a = K*b.
AM: Your function 9 is only valid in an open loop, and does not “actually” exist in a closed loop, and it is certainly not in effect. causal path =/= functional relationship.
RM: Again, I don’t know what could possibly be your basis for saying this. I think there is no evidence at all that this is the case. Indeed, the only relevant evidence I know of is consistent with the idea that this is not the case.
The basis for saying that the equation
(9) qo = - ko*ki * d i
is only valid in the open loop is that when you solve the system of your equation 5-8 that represent an open loop system, you get the equation 9. When you solve equations 1-4, for the closed loop system, you get equation 10. Those equations are solutions for different systems, and the solution of 1-4 is not a valid solution for 5-8
RM: What you are saying is that the observed functional relationship g-1 between qd and qo for a closed loop system (top equation) *is now the actual system function, the equivalent of the function f [] for the same system if it were open loop. If this were the case then there would be no “illusion” involved when you look at the relationship between qd and qo for a closed-loop system. What you are seeing, according to you, is the organism function, which the closed-loop has changed from f to g-1 .
No, I’m just saying you are using the word “actual” too much.
What you call an “actual qd-qo relationship” is the open loop system function F, or maybe F (H(d)). . I’m saying that your use of that expression is nonsense. In a closed loop, the qd-qo relationship is different from the open loop qd-qo relationship. No need to add “actual” anywhere.
RM: . This is shown clearly by my model of the behavior in my “Behavioral Illusion” demo. The model shows that the change in the observed relationship between qd and qo with a change in the feedback function, g , occurs with no change at all in the ** actual function, f , relating qd to qo.** The illusion is that the the observed functional relationship between qd and qo in an N-Systems reflects characteristics of the organism when they actually reflect characteristics of the environment in which the organism is behaving
In a closed loop, F is relating qo to qi. The organism box in the diagram above is relating qo to qi. Also in Bill’s diagram copied in first post, the F function is relating qo to qi.
AM: In the behavioral illusion, there is no difference between “observed qd-qo” and “actual qd-qo”.
RM: I think that’s about as wrong as you can get. I don’t know how you are able to read the 1978 paper and not understand that the observed relationship between qd and qo not the same as the actual relationship between qd and qo; the former is the inverse of the feedback function, g-1, and the latter is the organism function, f.
I do know how. The latter (“actual qd-qo”) is not the organism function f . The organism function is relating qi and qo.
The “actual qd-qo” is just your term for open-loop function relating qd to qo, and is not the solution for the closed loop situation, and thus not at all relevant for the closed loop situation.
Why do you call the open loop qd-qo function the “actual qd-qo” function? Why would it be more actual than the closed loop function?