I’ve been trying out some things with elliptic target tracking data. This was just me, tracking the target on the screen, using a graphics tablet and a pen, like this one:

Some example data:
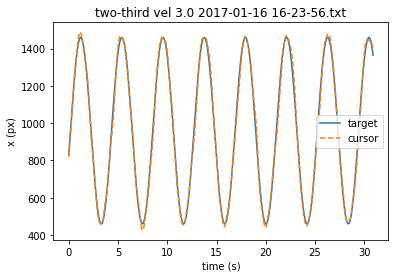
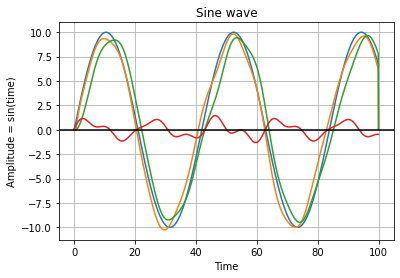
The two-third in the title is related to the power law stuff, for the x and y data it means that the trajectories were pure sinusoids when plotted against time like in this plot. This was one of the slower targets, vel 3.0 which looks like 0.2Hz or so.
The situation is not quite like tracking sinusoids in one dimension, since there might be more information in the visual scene for the participants to see and control, but let’s say it is similar if we decompose the trajectory to x and y over time.
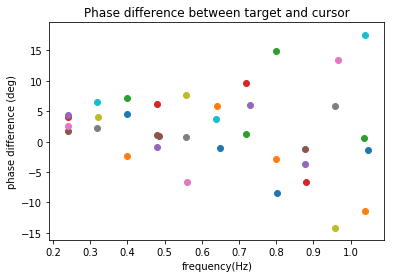
The phase difference is near zero, with a larger variance at higher speeds.
You also got fairly small phase differences, but were they negative for any cases? I seem to get them about the same amount as positive ones, especially for high-frequency targets. This would mean that on average the subject was leading in front of the target.
Btw. I used curve-fitting to find the phase, frequency and amplitude of the cursor and of the target wave, and then calculated the difference of the phases. I did not use FFT. The amplitude seems to be 1:1 between cursor and target.
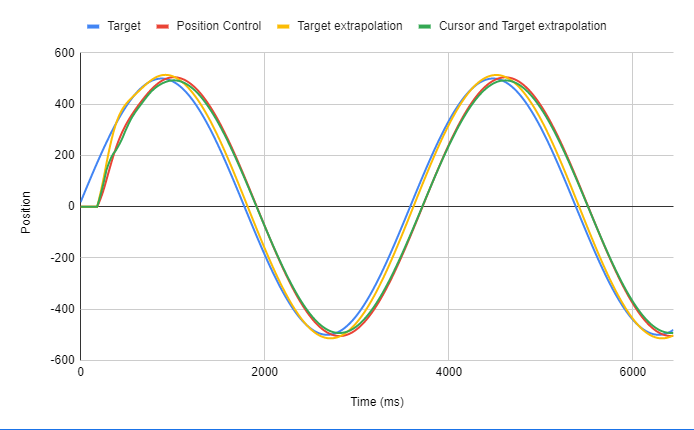
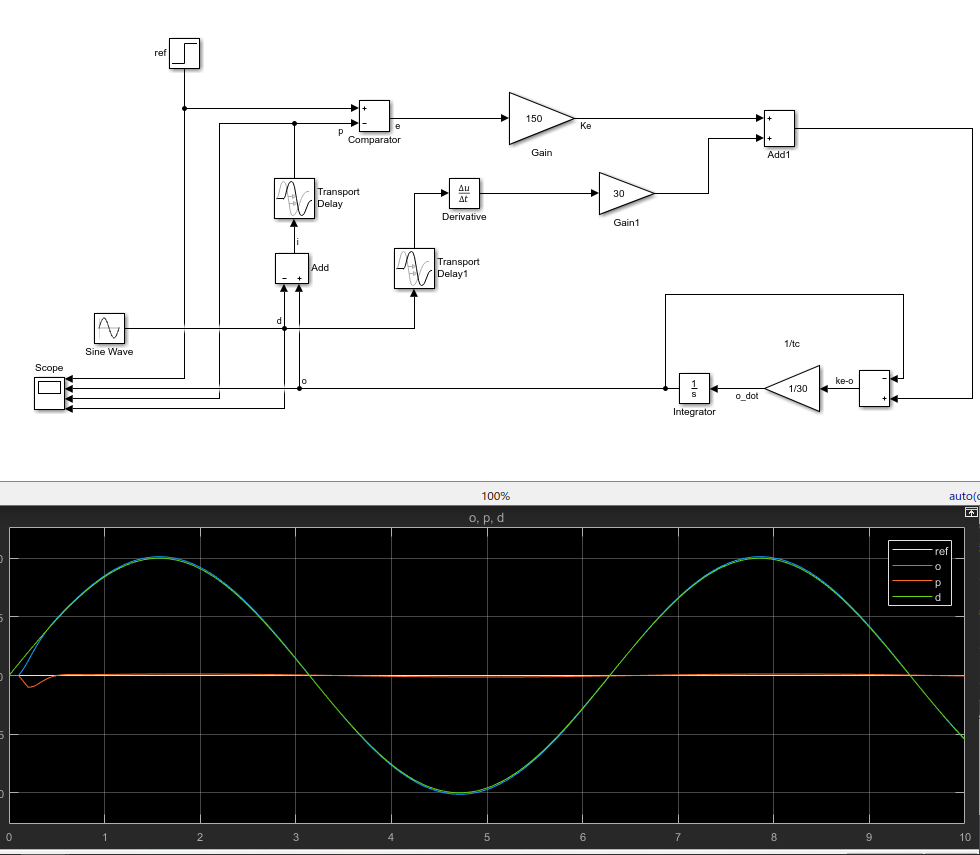
Next I tried running the two models against the target and comparing them. The extrapolation model seems better than just position difference. Here is one example of comparing the fit between the two models and the cursor:
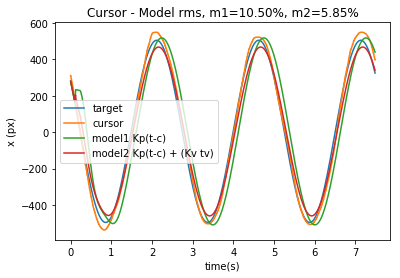
The red line is closer to the yellow line than the green one, meaning the model2 is fitting subject behavior better than model1. I’ve moved the curve to be centered at 0 px.
Here are the results for all tracks:
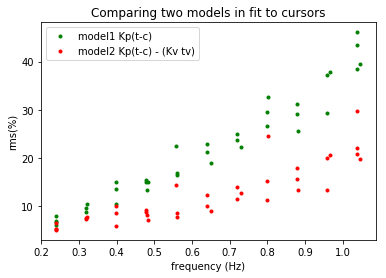
Lower is better, so all the model2 runs seem to fit better than model1 to subject behavior.
I’ve used Kp=8, delay=0.125ms, for model1 and model2. In model1, the damping gain is 0.2, in model2 the damping gain is 1.2, and the Kv = -130.
Though, maybe Kv should be multiplied by dt (which was 0.005). I did not change these parameter values between runs.
What parameter values would you say fit subject behavior best for the extrapolation model?
So, looks like a pretty good improvement over the t-c model for sinusoid tracking.
I was digging through the archives too. I remember reading that Bill had some ideas about extrapolating velocity when tracking targets.
[From Bill Powers (950529.1230 MDT)]
Hans Blom (950529) –
Nothing of this is new, of course.
- Tracking a regular (“predictable”) pattern with approximately zero delay has
frequently been encountered in human operator response speed studies.
You will find a demonstration of this effect in the 1960 paper by myself, Clark, and MacFarland. This can be be explained, as I said, using a hierarchical model. The first level is an ordinary control system controlling the cursor used for tracking. The second level perceives the synchronization of the cursor and target movements (the principle of the phase-locked loop will serve as the perceptual function), and the output function consists of a variable-frequency variable-amplitude oscillator which varies the reference signal for the cursor-position control system. This will achieve approximately zero average delay, without needing the kind of world-model in your program.
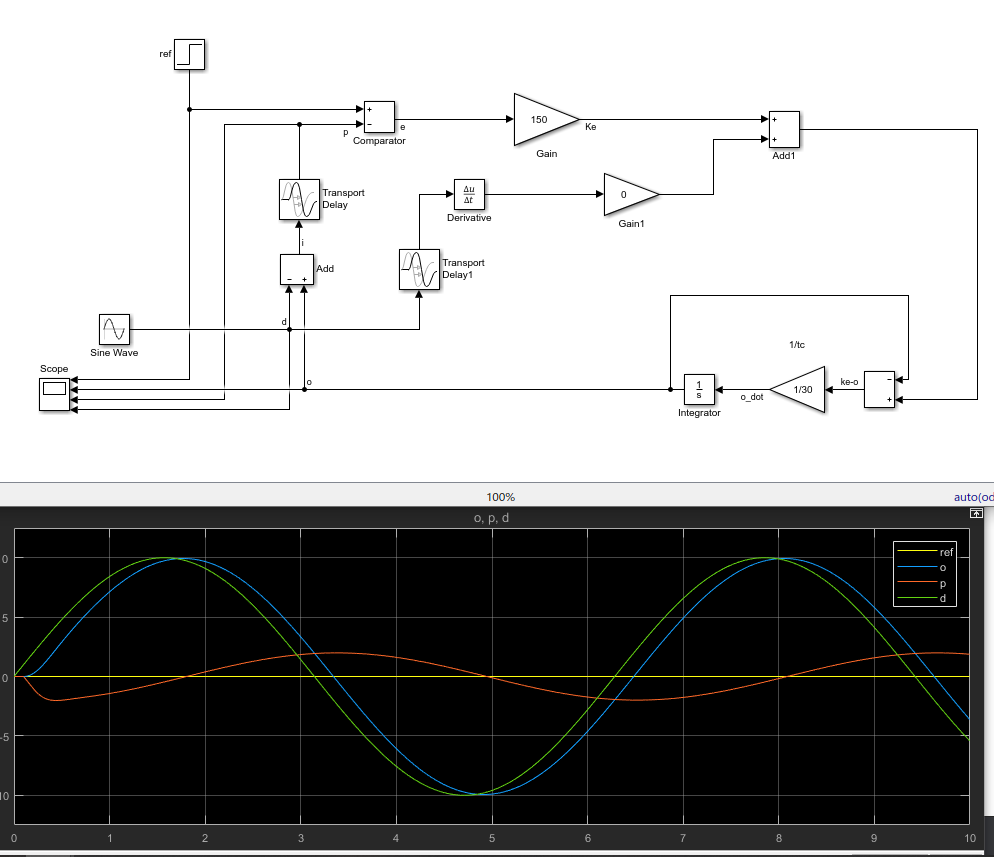
If the target moves in a sine-wave, there is an even simpler way of achieving zero delay, even with a single-level system. Simply add some first derivative to the perceptual signal representing target-minus-cursor. This can actually result in the cursor movements occurring slightly ahead of the target movements – a negative delay! We would use that model, of course, only if the real human
behavior also showed a negative delay.
[From Bill Powers (2005.02.15.0816 MST)]
[…]
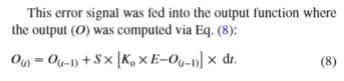
What do we mean by “predicting?” One meaning is surely to make a statement or form an expectation about something that hasn’t happened yet. But another is simply to act on the basis of the extrapolated future state of some variable – i.e., its first derivative times some adjustable constant, added to its present state. That’s how “anticipation” works in heating and cooling systems, and elsewhere. The effect of prediction or anticipation in this latter sense is, as we often find in control systems, the opposite of what
intuition suggests.