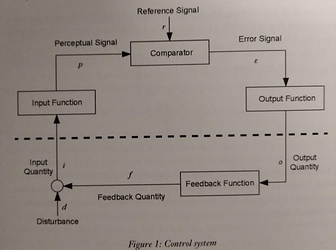
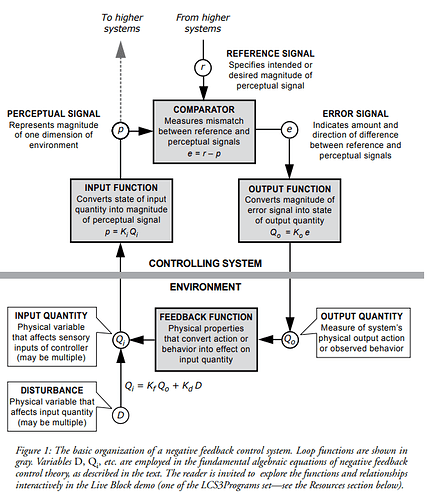
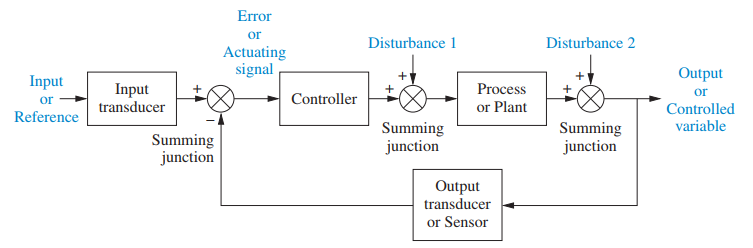
I think Phil (Hi, Phil!) misunderstands the nature of the CEV in a control loop. It is a variable, not a functions. It is the output of the summing junction where the environmental feedback function is added to the disturbance, not a function itself, though what I called the “summing junction” may be a function more complex than a simple addition, as may also be the comparator in the symmetric position with respect to the reference and perception inputs.
“Variables” are constructs that can be described by numbers, while “functions” are the ways those numbers relate to one another. The inputs and outputs of functions are variables. The CEV is a variable in Perceptual Reality constructed by some hierarchy of perceptual input functions from data derived both from sensory inputs and from imagination. It corresponds to a variable in Real Reality constructed by Real Reality functions that have inputs from the controller’s outputs to the environment and from elsewhere both perceivable and unknowable (effectively random noise).
Real Reality influences the senses, and the perceptual input functions construct all of Perceptual Reality, as a simulacrum of an aspect of Real Reality. We can know or rather, we can approximate, the Real Reality functions, but we can never know by what mechanism those functions are constructed.
We cannot know whether the mouse exists in Real Reality as we see it under our hand, but if we treat it as though it does, it usually functions as we expect it to do, and that’s enough for non-philosophical purposes. For practical purposes, it’s perfectly fine to talk as though what we see, feel, hear, smell, and so forth, like the mouse or dinner on the table, is what we get, even though we may later find out that it was a mirage, a hallucination, or an illusion. In ordinary circumstances, for concrete, tangible, objects it usually isn’t.
The implication is that we can approximate in our perceptual reality the functionality of any aspect of real reality to any level of precision we want. Physics has gone to extreme lengths in this direction, but even physics is clearly incomplete in detail, as are, and always will be, all other sciences, even PCT.
In respect of PCT diagrams, what serves communication best for the purposes of constructor and interpreter is the best diagram. I haven’t seen any yet that represent the entropy dissipation performed by perceptual control, or the relative energy flows involved in solving the problem of dissipating the heat created by the neural firings and other non-adiabatic processes involved. Nor have I seen diagrams that make prominent the important roles of side-effects .
There are many ways to represent the workings of a perceptual control loop, not to mention a hierarchy, depending on what it is you want to make clear, and to whom you want to make it clear. On the other hand, the discussion so far seems to be based on a shared assumption that everyone wants to make the same things clear to the same audience, every member of which has the same intellectual background and controls the same perceptions for which a correct visual understanding of PCT might reduce error.
I think that’s a wrong assumption, and the label of this thread is appropriate. Just as the police we encounter in the world enforce laws that describe overlapping prohibitions and requirements on people’s perceptual control actions, so the proposals in this thread describe what people should do, rather than what they might be trying to achieve.