Bruce,
it took me quite a long time to answer you. I admit I was deeply surprised about your answer.
I’m sorry Bruce, but it seems that we can’t come to some perfect agreement. Your opinion is quite clear. I think that we agree in general view how organism works and how it produces behavior, but there are some “detailsâ€? where we are practically on extreme, contrary positions.
-
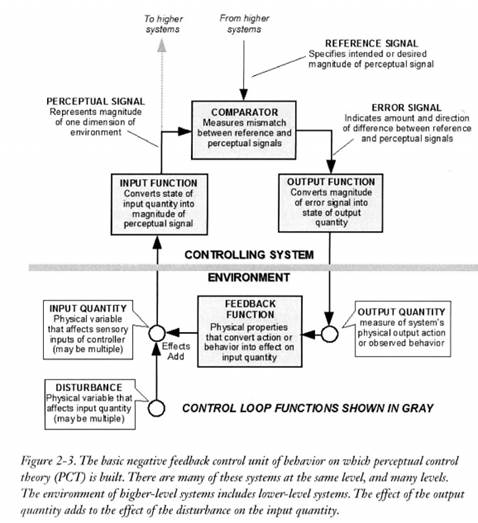
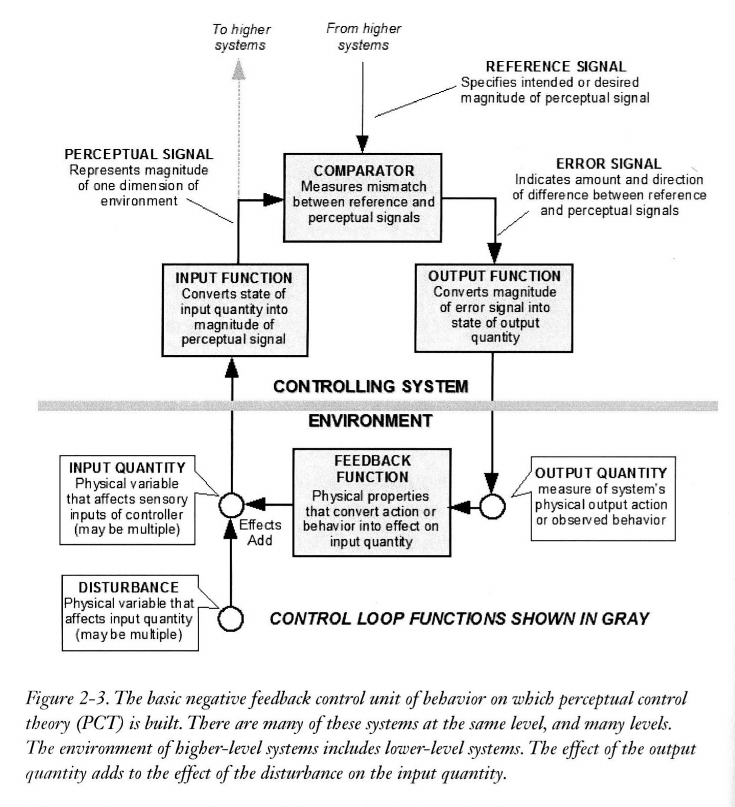
My opinion is that there is **no “subtractor�** (o-d) in environment in the “input quantity«. At least I never saw anywhere Bill using this combination. But “adder� (o+d) as it's seen from Bill's diagram as “**add effects**�, is something what is common in Bill’s theory, so effects of output and disturbances are “added� in environment. It's clear in his diagram.
It’s surprising that this is also Rick’s opinion if I may judge from his articles. One thing where we agree.
-
I think that the only “controlled variable� in control loop is “perceptual signal� (hence Control of perception). Perceptual signal is to be “controlled� in comparator to some reference level, which is formed inside organism.
Bill P : So for “the organism to have control over any sensed condition of the environment, all that is necessary is for it to possess the means to cause that condition (as perceived) to vary in each of the possible ways it can varyâ€?….(B:CP).
 p;
I see this as continuous “control”, and is diffferent to »sometimes controlled quantity" outside organism, which is by my opinion “imagined” construct, and “show” from time to time »counteracting« effects in environemnt. . Organism can’t control discretly from time to time. Their “Control of perception” is continuos.
I understand Bill as that organism »sense conditions« and control them. Not vica verse, that conditions are controlled and then organism sense »controlled conditions« through »controlled perceptual variable«. So I don’t think “perceptual signalâ€? can be something controlled from outside, to become “controlled perceptual signalâ€?, and in that sense “outside environmentâ€? could control organism. I think that “perceptual signal” is controlled inside organism to some genetically set references (directly or indirectly).
Bill P (LCS III) : Therefore changing the reference signal (with active cooperation from components in the control loop) very reliably changes the magnitude or state of the input quantity…
Comparator is by my oppinon the place for »control« and other components in control loop are helping control to be accomplished by »converting« effects through control loop.
I don’t see any »controlled sensed conditions« coming from environment.so that we could talk about »controlled perceptual variable«.
So I don’t think that »subtraction« in form of “Control of disturbances� (opposing) could possibly “control input�. I think that “perceptual signal� can not be “controlled� in advance from outer environment, but »perceptual signal« itself  is »controlled«. So I think that the only “controlled variable� in control loop is perceptual signal (hence »Control of perception«).
But people perceive »facts« obviously differently. The cause is probably variety of perceptions and variety of their control in comparator (nervous system).
-
Behavior for me is not “control� because “output� is not controlled. So I think it's “control empty� and it can't control anything in outer environment. Effects of behavior to environment are in accordance with internal control of controlling system. So effects of internal control can by my opinion be limitly observed in outer environment as interpreted by observers own way.
As for equality of your and Bill’s opinion is concerned I think that you are not perfectly aligned as you pointed out. If you remember our conversation about “Kid who doesn’t talkâ€?, you accused Bill that he is seriously misleading CSGnet. You can check it. So I’m still wondering, how could author of theory and founder of CSGnet seriously mislead somebody about his theory ? So I have a reason to beleive that your and Bill’s opinion are not aligned. Speccially not about “adderâ€? and “subtractorâ€? in the form of “input quantityâ€?.
This is just my opinion. So members can decide whatever they wish.
As for cybernetics you talked about is concerned I made a separate thread.
Boris

···
From: Bruce Abbott [mailto:bbabbott@frontier.com]
Sent: Saturday, November 28, 2015 3:43 PM
To: csgnet@lists.illinois.edu
Subject: RE: FW: What’s perception got to do, got to do, with it?
[From Bruce Abbott (2015.11.28.0940 EST)]
From: Boris Hartman [mailto:boris.hartman@masicom.net]
Sent: Saturday, November 28, 2015 1:20 AM
To: csgnet@lists.illinois.edu
Subject: RE: FW: What’s perception got to do, got to do, with it?
Hi Boris,
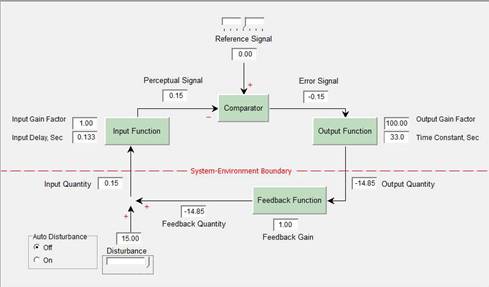
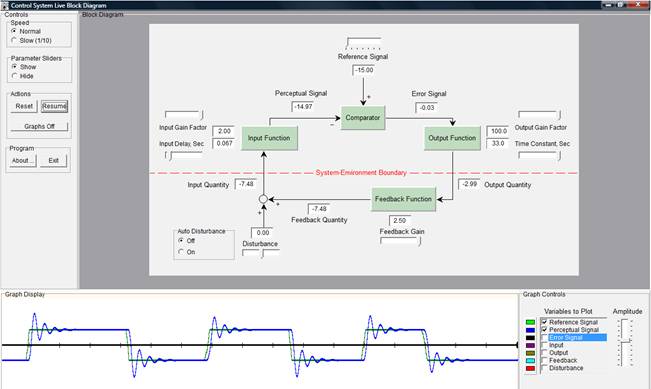
In my replies to your questions, I will refer you to the screen shot of the LiveBlock program from LCS III shown below:
HB: I’d like to be sure if I understand clearly what you are saying. So I’ll try to sum only the part which I think is different by our oppinions.
BA : In the diagram below, the controlled variable is the small circle labeled as the »input quantity.« Its value is affected by the disturbance and by output quantity, operating on the input quantity via the feedback function. The feedback is negative, so adding the effects of feedback and disturbance accomplishes subtraction.
In the LiveBlock diagram above, the input quantity is represented by the small circle seen below the »System-Environment Boundary,« i.e., in the environment, and by the arrow leaving that circle and entering the Input Function. It is affected by disturbances (vertical arrow) and the feedback quantity (horizontal arrow coming from the Feedback Function). These two quantities add to the Input Quantity, as shown by the two plus signs. However, in normal operation the disturbance and feedback quantities change in opposite direction (because the feedback is negative), so the effect is one of subtraction, i.e., effect of feedback on the input quantity subtracts from the effect of the disturbance on the input quantity.
The circle represents the addition of these two influences to the input quantity. The arrow leaving the circle represents the resulting value of the input quantity. Both of these influences (disturbance and feedback), as well as the input quantity itself, lie in the environment of the control system.
If this were a home heating system, the input quantity would be the actual room temperature, the output quantity would be heat from the furnace, the feedback quantity would be the effect of that heat on the room’s temperature, and disturbances would be anything that disturbs actual room temperature, such as leakage of heat through the walls. Leakage of heat acts to reduce actual room temperature, whereas heat from the furnace acts to increase actual room temperature. Thus the action of the furnace (heat production) counteracts the effect of disturbances (heat loss).
HB : Do I understand right that »subtractor« is outside the »controlling system« ?
Yes, it is the little circle in the above diagram, found in the environment of the control system.
HB: And that »input function« is the place where »subtraction« is going on ?
No. The little circle is not the input function. The little circle (and the arrow leaving it) is the input quantity, qi. In my example, it’s the room temperature. The input function is the rectangle labeled as such in the LiveBlock diagram. It receives input from the input quantity and generates the perceptual signal as its output.
HB: And »input quantity« is fixed, really existing entity in environment ?
Yes, the input quantity is a really existing entity in the environment. (In the example it’s the room temperature.) It varies in response to the effects of the disturbance and feedback, so, no, it is not fixed.
HB: Did Bill mentioned somewhere specifically that this is happening in environment ?
Yes. Please note that the LiveBlock diagram is Bill’s diagram.
HB: Do I understand right that »output quantitty« is affecting controlled variable the »input quantity« ?
In the LiveBlock diagram, the output quantity is represented by the arrow leaving the output function and entering the feedback function. The output of the feedback function is the arrow entering the circle where the feedback and disturbances act on the input quantity.
In some versions of the diagram, the output quantity is shown directly affecting the input quantity. This is a convience done to simplify the diagram for purposes of exposition. When this is done, it is equivalent to assuming that the feedback function simply multiplies the output by a factor of 1.
HB: So can I understand that actions (output) are not controlled ? Just effects ?
In the diagram, actions (output) are not controlled. The output is simply a function of the error signal. The larger the error signal, the greater the magnitude of the output.
HB: And can I conclude that Warren’s and Tim’s conclussion in their article is not right :
Warren and Timothy : …«universal property of organisms : actions as the control of sensory input«.
Look at the LiveBlock diagram. Actions (output) are transformed into effects on the input quantity by the environmental feedback function. They oppose the effects of disturbances on the same input quantity. The input quantity affects the control system through its sensory inputs. (In the case of the home heating system the thermostat contains the sensor of room temperature.) The Input Function takes qi as input and converts this quantity to a perceptual signal that varies as a function of the input quantity. That signal is compared to the reference signal at the comparator (middle upper block in the diagram). The comparator produces the error signal, which determines the magnitude the the output quantity via the output function.
By opposing the effects of the disturbance on qi, the system acts to control its own sensory inputs, as the system perceives them.
HB : Or they are right ? If we go with backward analyses in your oppinion about »control« we can maybe say that »output quantity« is having some controlled effects on »input quantitty« ? Or not ? Or Rick is also not right when he is saying that »behavior is control« ?
That depends on what you mean by »controlled effects.« The output quantity, acting via the feedback function, affects the input quantity (e.g., heat from the furnace affects the room temperature). But this effect by itself is not control. Control emerges from the »behavior« of the system as a whole – from the fact that output is a function of error, that the feedback onto qi is negative, and that this feedback is scaled to an appropriate magnitude and applied without too much delay. If these factors are right, then the effect will be to oppose the effect of disturbances so as to bring the internal representation of qi (its perception) close to the reference value and hold it there – in other words, the system will control.
BA : The feedback compensates for the disturbance, so that its effect on the input quantity is minimized. That is, the value of the input quantity is controlled. The input quantity is thus the controlled variable in the environment.
HB : If I understand right »compensation« happens in outer environment, not in the whole control loop ? And the »input quantity« is the only »controlled variable« in the control loop ?
Yes, compensation happens in the outer environment, where feedback affects the input quantity. However, the input quantity determines the value of the perceptual signal, which is what the control system perceives. (It has no direct knowledge of the input quantity.) The control system controls its perception of the input quantity. To the extent that this perception corresponds to the value of the input quantity, then the input quantity is also controlled.
BA : The input function converts this input (sensed value of the controlled variable) to an internal representation of the controlled quantity called the perceptual signal. Because the perceptual signal tracks the value of the controlled variable in the environment, it is also controlled.
HB : Do I understand right that, the only »controlled variable« in environment »input quantitty« is converted to internal representation »perceptual signal«, which is thus »controlled perceptual signal« ?
Yes!
BA : The perceptual signal is the person’s inner representation of the controlled variable in the environment, so if the environmental variable is controlled, so is its perception. We can only directly know our perceptions, so from the organism’s point of view, what is controlled are its perceptions.
HB : Do I understand right that »controlled perceptions« which are the result of »control process« in environment are representing the organism’s point of view of what is being controlled ?
Yes!
BA : I hope I’ve made it clear by now that Bill and I are saying the same thing; I am not proposing any changes. If I had that wrong, surely Bill would have pointed that out to me.
HB : I think that equating your and Bill’s knowledge can wait a little, because whatever you presented till now is not what is »equating« your and Bill oppinion. I’ll explain later as we »define« control.
Well, that’s disappointing, because as I see it, Bill’s opinion and mine are the same.
BA : Boris, how do you define »control«? As I define it, control involves acting on a variable in such as way (via negative feedback) as to cancel the effects of disturbances to that variable.
HB : This is maybe general definition of the »control« in machines. But not in organism. Maybe here is misunderstanding. In organism control is defined as :
Bill P. and others (50th Anniversary) :
-
**Perceptual Control Theory (PCT) provides a general theory of functioning for organisms.** -
**At the conceptual core of the theory is the observation that living things control the perceived environment by means of behavior**
Also Ashby used defitnition of »control« in organisms in very similar way when he defined homeostasis :
Ashby (1960) : I propose defitnition that a form aof behaviour is adaptive if it maintains the essential variables within physiological limits.
As I see it, control in PCT is going on in organism continuosly (with milions of cooperating control units) and through actions on environment, which also cancel the effects of disturbances.
Behavior is supporting to control in organism. So it’s not necesary that it appears in every moment. The output »o« can be zero, and also »d« can be zero. And sometimes both can limit zero. Whatever imagined construct »input quanttity« represent, it’s not a general concept which could »cover« all control situations, as there are actually cases when there is no »control« in »input quantity« by your definition. But in organism control runs all the time, it can’t be that control in organisms don’t exist or stop. Organism dies.
If you are lying on the sun (sunbathing) there is no action »o«, but disturbances »d« are acting on organism, including sensors.
The sun is heating my body and I am just lying there. But absence of action does not imply absence of control. Absence of action in this case means absence of error. My skin temperature as I perceive it is close enough to my internal reference that there is no error and therefore I take no action. But if my skin temperature rises enough due to the disturbing effect of the sun on my skin’s temperature, error will develop and I will move to the shade or cover up.
HB: So there is no »control« in outer environment and still organism is controlling. Orgnisms control inside not outside. I think that whatever you tried to represent as »control« is not »control in organisms«, which has to be in accordance with physiological »facts«, but control of »machines«, what by my oppinion is not the same.
While I am lying there in the sun, my skin (or body) temperature may not be hot enough to generate sufficient error that I will take action via my musculature. However, internal control systems are still monitoring skin and body temperature and comparing these as sensed to reference values. If there is error these physiological, homeostatic mechanisms will initiate actions of their own, such as sweating, that act to oppose the sun’s disturbance. If ultraviolet rays are damaging the skin, other control systems that sense this damage will take action to oppose this effect of the sun, such as generating melonin in the skin, which absorbs the damaging rays.
All of these systems – those that require the action of the muscles and those that act inside the body in other ways (via the autonomic nervous system, glands, etc. – act all the time, and all operate via the physiological systems of the body. There simply isn’t any difference. They are all control systems. The muscles act on the environment outside the skin, but those other control systems, though they act internally with respect to the body surface, still exert actions the affect variables in the environments of those control systems. It just happens that those invironments are inside the skin.
HB: You also exposed similar view as Bill and Ashby did in your Synopsis :
BA : At the heart of perceptual control theory is the idea that human beings are essentially intricate control mechanisms that function to keep certain intrinsic (or essential, see Ashby, 1952) variables within survivable limits. Intrinsic variables (variables intrinsic to the organism) include basic physiological variables such as blood glucose levels or body temperature, as well certain high-level variables whose maintenance in certain states are crucial to the individual’s well-being; the references of these intrinsic variables are genetically specified. With respect to physiological quantities, the body is known to house numerous control mechanisms that help to maintain them within the narrow limits required for efficient operation and survival. These mechanisms are capable of sensing the current levels of these controlled quantities and automatically initiating physiological changes as necessary to correct deviations of these levels from reference values, a process that the early 20th century physiologist Walter Cannon (1932) termed homeostasis.
BA: Although at any given moment a tremendous number of physiological quantities is being automatically regulated through nonbehavioral (purely physiological) means, the regulatory mechanisms by themselves are not capable of countering all the sources of potential disturbance to the intrinsic variables. To take one example, because humans are not rooted in the soil like plants, we must seek out and consume food and water. Automatic physiological mechanisms do act against disturbances to internal levels of water and nutrition, but these only can take the form of actions to reduce the rate of depletion of these quantities. To replenish them, we must behave. That is, we must move our muscles in a way that ultimately leads to locating, obtaining, and consuming food and water. Behavior, then, is a means by which humans (and other animals) defend their intrinsic variables against disturbance.
HB : Your view upon PCT in Synopsis as I said many times before, influenced my view. In Synopsis you are clearly saying that organisms »control« inside »at any given moment«, but with behavior organisms have to »replenish essential quantities« from time to time. Behavior is not continuous. So effects of behavior on environment are occasional, when organisms needs it. And that can’t be control, because »control in organism« is continuous inside and behavior is just means of control (inside).
Where you are going wrong, in my opinion, is assuming that lack of action implies lack of control. Of course, if we are not controlling a given variable, we take no action when the variable changes its value. But what of the variables that we do control? Lack of action means lack of sufficient error to support any action.
For many variables that we control, there is a »deadband« or range of values across which no error will be generated. The current value is »close enough« to reference. We don’t eat continuously because there is a range of nutrient levels in the digestive system and elsewhere in the body over which you will not feel hungry. Only when these levels fall below some threshold will there be an error that will impell you to action.
Another misconception you may be having is believing that the term »environment« applies only to variables outside the body. That is the environment that your muscles act on in order to control certain environmental variables, but for other control systems the environment in which they act is internal. In HPCT, for example, the »envronment« of a Level 2 control system is the Level 1 control system through which it acts and from which it receives its perceptual signals.
On further point: Imagine that I’m lying in the sun and because of some drug effect I am no longer conscious of my skin temperature. My skin temperature is rising well above the level at which I would normally take action by moving into the shade. But my perception of skin temperature is close to my internal reference for it, so I do nothing. I’m still controlling perceived skin temperature, but no longer controlling actual skin temperature.
Now imagine the opposite scenario: the drug is affecting my perception of skin temperature so that it does not relate to actual skin temperature. Suddenly my skin feels uncomfortably hot and I immediately move into the shade, even though my actual skin temperature is within the range of values over which I normally would not take action. I’m still contolling percieved skin temperature, but now this control is allowing actual skin temperature to fluctuate wildly. The latter is no longer controlled, even though perceived skin temperature still is.
The two scenarios above demonstrate why Bill placed such an emphasis on control of perception. Much of the time, by controlling a perception, we also control the environmental analog of that perception, the input quantity. In such cases the input quantity is properly referred to as the controlled quantity. (Bill used the term »quantity« to refer to physical variables, as distinguished from the term »signal,« which conveys information internally.) Sometimes the perceptual signal does not correlate well with any environmental variable, yet the control system may still be able to control its perception, as in the cases described above. Control is always control of perception, although environmental correlates of those perceptions may (or may not) be controlled as well.
HB: Your oppinion in Synopsis is by my oppinion in accordance with Ashby and Bill and I of course support it.
HB: I hope it’s O.K. that before answering on your whole post I checked whether I understand clearly what are you saying, because I have impression that something disturbed your »whole« judgement about how organisms control. Well if I’m sincere I blame Rick for this confussion. I just wanted to avoid misunderstandings with you. And if possible I’d like to come with you in agreement. As I said I highly value your oppinion.
That’s certainly O.K. with me, Boris. I hope my replies have helped to bridge the differences between us.
Best wishes,
Bruce A.