RM: True.
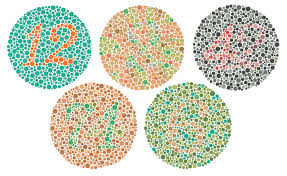
AM: The color vision test is a pre-PCT test for the controlled variable.
RM: I think it’s a pre-PCT test of whether you can control a particular variable: the relationship between the character you see on the plate and the character you say.
RM: The TCV starts with a question about what variable is being controlled; the color vision test starts with a question about whether a particular variable can be controlled. The TCV ends with a description of the variable (or variables) that are being controlled when a person is performing a particular task; the color vision test ends with a description of the circumstances under which the variable can and cannot be controlled.
AM: You find out the the exact form of the input function for transforming multiple wavelength light into color perception.
RM: Yes, since you already know the perception to be controlled (the relationship between the character you see and the character you say) you can determine how variations in the relevant disturbances to that variable – the colors of the character and background – affect the ability to control that perception. What is found is that for most people, as long as the colors of character and background are different, they can control the relationship between the character they see and the character they say. But some people can’t control this perception even when the colors of character and background are different - some differences don’t make a difference.
RM: So you can learn a lot about why people behave the way they do – in this case, you can learn a lot about color perception – once you have a pretty good idea of what perceptions they control when they are carrying out various activities.
AM: There are probably good lessons to learn from the development and application of those tests.
RM: It would be nice if you could describe one or two of these lessons. I can think of any lessons from the color test work that would be relevant to doing the test for controlled variables. On that note, I think you didn’t quite get it right in your analysis of my helicopter following model. You said:
AM: In your helicopter following model, the variable alpha is an angle, the input function is a rate sensor, and the perceptual signal correlates with an angular velocity, not with the angle. The angle (qi) is not controlled, and does not correlate with the perception. I would call the angular velocity in the environment a controlled quantity, but not an input quantity.
RM: Actually qi is what is computed by the input function – it corresponds to the perception-- p – in the model. The angle that you call qi is itself a perception that is a lower level input to the input function.
RM: qi is the controlled variable – actually, a hypothesis about the controlled variable. Two possible qi’s were tested in the helicopter pursuit study: vertical optical velocity and vertical optical acceleration. These were two hypotheses about the perceptual variables – qi = d.alpha/dt or qi - d2.alpla/dt – controlled when intercepting the helicopters. These perceptions were defined in terms of a lower level perception, alpha – vertical optical angle.
RM: The test was done by seeing which hypothesis about the controlled variable – which qi – when used as the variable controlled in the vertical dimension, provided the best fit to the data. What we found is that the model that controlled vertical velocity – qi = d.alpha/dt – consistently fit the data better than the model that controlled vertical acceleration – qi = d2.alpha/dt.
RM: I did this analysis to show how to do the test for the controlled variable using modeling. I actually tested three hypotheses about the variables controlled when intercepting the helicopters – LOT, optical velocity and optical acceleration. LOT was tested in the “old-fashioned” way – by showing that linear optical trajectory (LOT) Is not protected from disturbance, such as irregular trajectories of the pursued object. I was actually surprised to find that it was possible to distinguish between optical velocity and acceleration as possible controlled variables since I thought these variables would be too highly confounded. But the results were pretty clear – optical velocity – not optical acceleration-- is the best hypothesis about the optical variable controlled when intercepting moving objects.
RM: This is the kind of PCT- based research that I would like to see being done. If you are interested – and I wish you were because you could do this stuff far better than I can – let’s continue the discussion over at the Powers’ Model of a PCT-Based Research Program topic.